














Chapter 3 Selection
3–2
3-1 Selecting the linear servomotor
It is important to select a linear servomotor matched to the purpose of the machine that will be
installed. If the linear servomotor and machine to be installed do not match, the motor performance
cannot be fully realized, and it will also be difficult to adjust the parameters. Be sure to understand the
linear servomotor characteristics in this chapter to select the correct motor.
3-1-1 Max. feedrate
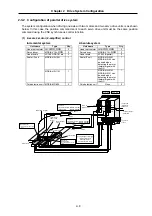
The max. feedrate for the LM-N Series linear servomotor is 120m/min. However, there are systems
that cannot reach the max. speed 120m/min depending on the linear scale being used. Refer to the
section "2-3-1 Standard linear servo system) for the main systems and possible max. feedrates.
3-1-2 Max. thrust
The linear servomotor has an output range for the continuous thrust that can be used only for short
times such as acceleration/deceleration. If the motor is a self-cooling type, a thrust that is approx.
6-fold can be output. For an oil-type motor, a thrust that is approx. 3-fold can be output.
The max. linear motor thrust required for acceleration/deceleration can be approximated using the
machine specifications and expression (3-1).
Fmax = (M • a + Ff) • 1.2
・・・
(3-1)
Fmax : Max. motor thrust
(N)
M
: Movable mass (including motor's moving sections)
(kg)
a
: Acceleration during acceleration/deceleration
(m/s
2
)
Ff
: Load force (including cutting force, wear and unbalance force) (N)
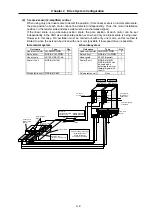
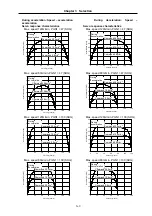
Note that there is a servo response delay as shown on the
right in respect to the acceleration in the acceleration/
deceleration command set with the CNC. Thus, the
acceleration characteristics (thrust characteristics required
for acceleration/deceleration when movable mass is
applied) in respect to the speed required for the linear
servomotor will be as shown on the next page. (Conditions:
Indicates the characteristics using the position loop gain
during SHG control using a linear acceleration/deceleration
command pattern.) Thus, when selecting the linear motor,
refer to the speed - acceleration (thrust) characteristics on
the next page, and confirm the speed - thrust
characteristics (4-4 Torque characteristics drawing) for the
linear motor.
(Note)
The speed – acceleration characteristics on the next page are reference values at a specific
condition, so if an S-character acceleration/deceleration filter is applied on the command, if
the position loop gain differs, the characteristics will also differ.
Speed
Time
Command
speed
Servo response