




















Contents
i
Page
1.3 CE marking specifications .................................................................................................................................................... 1-2
1.4 Indirect export .......................................................................................................................................................................... 1-2
1.5 Instruction manuals ................................................................................................................................................................ 1-2
1.6 Contents of the structural equipment ............................................................................................................................ 1-3
1.6.1 Robot arm ........................................................................................................................................................................... 1-3
1.6.2 Controller ............................................................................................................................................................................ 1-4
2.1 Standard specifications ........................................................................................................................................................ 2-7
2.2 Definition of specifications .................................................................................................................................................. 2-8
2.2.1 Pose repeatability ............................................................................................................................................................ 2-8
2.2.2 Rated load (mass capacity) ......................................................................................................................................... 2-9
2.2.3 Protection specifications ............................................................................................................................................ 2-10
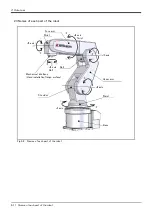
2.3 Names of each part of the robot .................................................................................................................................... 2-11
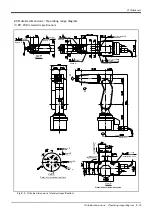
2.4 Outside dimensions ・ Operating range diagram ........................................................................................................ 2-12
(1) RV-2SD (standard specification) ........................................................................................................................ 2-12
(2) RV-2SDB-S15 (CE marking specification) .................................................................................................... 2-13
(3) Operating range (Common to the standard/CE Marking) ........................................................................ 2-14
(1) RV-2SD(Standard specification) ........................................................................................................................ 2-15
(2) RV-2SDB(CE marking specification) ................................................................................................................ 2-16
2.5.2 Internal air piping ............................................................................................................................................................ 2-17
2.5.3 Internal wiring for the pneumatic hand output cable ...................................................................................... 2-17
2.5.4 Internal wiring for the hand check input cable .................................................................................................. 2-17
2.5.5 Wiring and piping system diagram for hand ......................................................................................................... 2-18
2.5.6 Electrical specifications of hand input/output .................................................................................................. 2-20
2.5.7 Air supply circuit example for the hand ............................................................................................................... 2-21
(1) Machine cable extension ........................................................................................................................................ 2-23
(2) Changing the operating range .............................................................................................................................. 2-27
(3) Solenoid valve set ..................................................................................................................................................... 2-28
(4) Hand input cable ........................................................................................................................................................ 2-30
(5) Hand output cable ..................................................................................................................................................... 2-31
(6) Hand curl tube ............................................................................................................................................................ 2-32
3.1.1 Standard specifications ............................................................................................................................................... 3-34
3.1.2 Protection specifications and operating supply ................................................................................................ 3-35



































































