




























6Safety
Safety 6-102
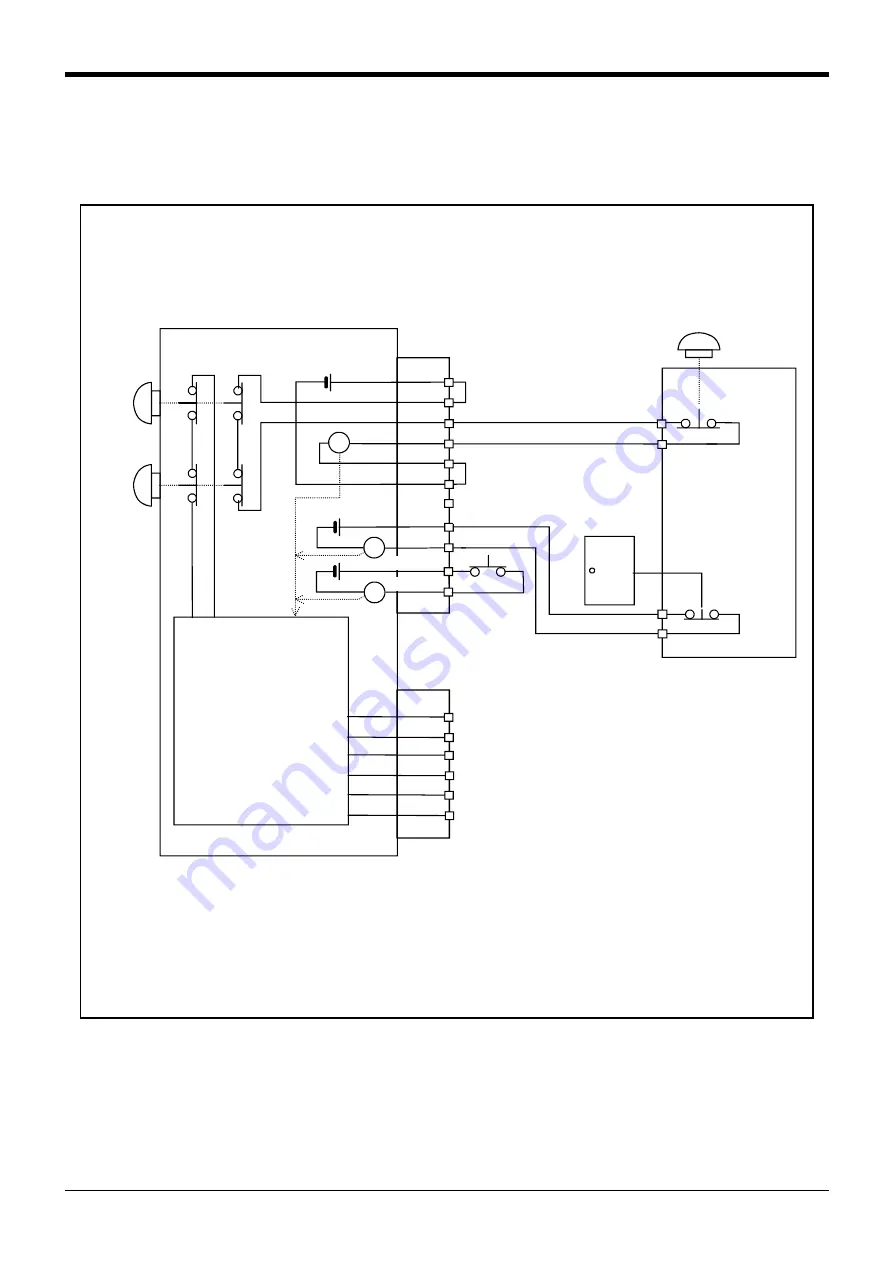
6.1.7 Examples of safety measures
Two emergency-stop input circuits are prepared on the user wiring terminal block of the controller. Create a cir
-
cuit as shown below for safety measures. In addition, the figure shows the normal state which is not in the emer
-
gency stop state.
Fig.6-1 : Example of safety measures (Wiring example 1)
1A/1B
2A/2B
3A/3B
4A/4B
5A/5B
6A/6B
8A/8B
9A/9B
1A/1B
2A/2B
3A/3B
4A/4B
5A/5B
6A/6B
EMGIN1/2
EMGOUT1/2
付加軸用コンタクタ
コントロール出力
内部非常停止回路
ロボットコントローラ
短絡(出荷時短絡済)
非常停止スイッチ
(2接点タイプ)
エラー出力
モード出力
周辺装置
TB非常停止
ボタン
OP非常停止
ボタン
}
RA
RA
RA
短絡(出荷時短絡済)
7A/7B
}
}
10A/10B
11A/11B
ロボットコント
ローラ内電源 24V
ドアスイッチ入力
安全柵のドア
イネーブリング
デバイス
[Caution] Since we have omitted the information in part because of explanation, there is the section different from the
product. Also refer to
Page 52, "Fig.3-12 : External emergency stop connection"
<Wiring example 1>: Connect the emergency stop switch of peripheral equipment to the robot controller.
The power supply for emergency stop input uses the power supply in the robot controller.
<Operation of the emergency stop>
If the emergency stop switch of peripheral equipment is pushed, the robot will also be in the emergency
stop state.
*1)EMGIN1/2, and EMGOUT1/2 have
the two terminals separately, and
show that they are the two lines.
Always connect the two lines.
*2) 1A/1B, and 2A/2B terminal of
EMGIN is short-circuited at
factory shipments.
*3)5A/5B, and 6A/6B terminal of
EMGIN is short-circuited at
factory shipments.
Notes) If "*2" and "*3" are removed,
it will be in the emergency stop
state.
*4) The emergency stop button of the
robot controller operation panel.
*5) The emergency stop button of T/
B connected to the robot
controller.
*6) Emergency stop input relay.
*1)
*2)
*3)
*4)
*5)
*6)
Robot controller
Short circuit
(short-circuited)
Enabling
device
Door switch input
Short circuit
(short-circuited)
Power supply in the
robot controller 24V
Emergency stop switch
(2- contact type)
Peripheral
equipment
Safety
fence door
OP
Emer
-
gency
stop
button
TB
Emer
-
gency
stop
button
Internal emergency stop
circuit
Error output
Mode output
Contactor control
output for addi
-
tional axes






































































