








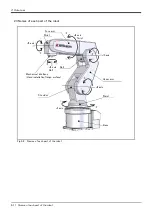













2 Robot arm
Tooling
2-16
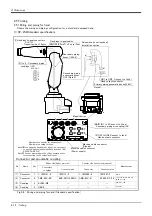
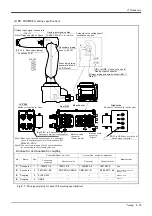
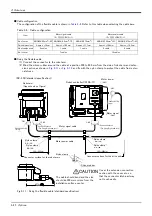
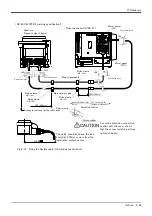
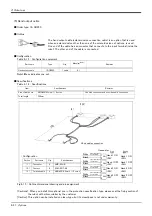
(2) RV-2SDB(CE marking specification)
Fig.2-7 : Wiring and piping for hand (CE marking specification)
(3)1~4 : 2次配管用継手
(φ4用)
電磁弁セット(オプション)
取付部分
ア
イ
2次配管エアホース
(φ4×4本)
2次配管エアホース
(φ4) 注2)
1次配管エアホース
(φ6×1本) 注2)
GR1~GR4 (イと接続)
ハンド出力用コネクタ
(2) GR1~GR4 (イと接続)
ハンド出力用コネクタ
機器間ケーブル
(信号用)コネクタ
機器間ケーブル
(電源用)コネクタ
(4)AIR IN 1~4 (アと接続)
2次配管用継手(φ4)
ハンド出力用コネクタ番号
注1)ハンド出力をご使用になる場合は、オプションの
エアハンドインタフェース(2A-RZ365)が必要です。
注2)電磁弁セットに接続するφ4エアホースは
お客様でご準備ください。
AIR OUT
1
2
3
4
ハンド入力信号ケーブル
( AWG#24(0.2mm2) x 2芯4本{)
(1)ハンド入力信号コネクタ
(CON1H)
注)図の反対側
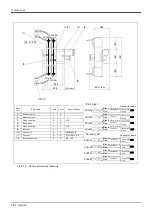
左側面
背面
右側面
ハンド用継手番号
[拡大図]
Connector and pneumatic coupling
No
Name
Qty.
Robot side(Robot arm side)
Counter side (customer-prepared)
Manufacturer
Connectors,
couplings
Connector pins
Connector
Connector pins
(1) Connector
1
1-1903131-6
1903112-2
1-1827864-6
1827587-2
AMP
(2) Connector
4
SMP-02V-BC
BHF-001GI-0.8BS
SMR-02V-B
BYM-001T-0.6
Japan solderless terminal
MFG. Co.,LTD
(3) Coupling
4
KJS04-M3
-
-
-
SMC. Co.,LTD
(4) Coupling
4
UKB4
-
-
-
Koganei
(1)Hand input signal connectors
Secondary piping
hoses (φ4*4)
GR1 to GR4 : Connect to the b)
Hand output connector
Primary piping pneumatic hoses(φ6*1)
Note2)
Magnification
Number of connector for hand output.
Note1)When using the hand output signal, it is necessary
to use the optional pneumatic hand interface (2A-
RZ365/2A-RZ375)
Note2)The user must prepare the φ4 pneumatic hoses
for connecting to the solenoid valve set.
a)
b)
Note) Opposite side of figure
AWG24 (0.2mm
2
) x 2 core: Four
Hand input signal cables
Solenoid valve set(optional)
installation section
(3)1 to 4 : Secondary piping
couplings (φ4)
Secondary piping
pneumatic hoses
(φ4) Note2)
Rear side
Left side
Right side
Number of coupling for hand.
Machine cable
connector
(Signals)
Machine cable
connector
(Power supply)
(4)AIR IN 1 to 4:Connect to the a)
Secondary piping air coupling(φ4)
(2)GR1 to GR4:Connect to the b)
Hand output connector







































































