
























-191-
Appendix 8.3 Force Sense Function Related Error Details
[Types of the first alphabets of the error No.
→
H: High level error, L: Low level error, C: Caution
(Warning) "n" at the end of the error No. in this list indicates the axis number (1 to 8).]
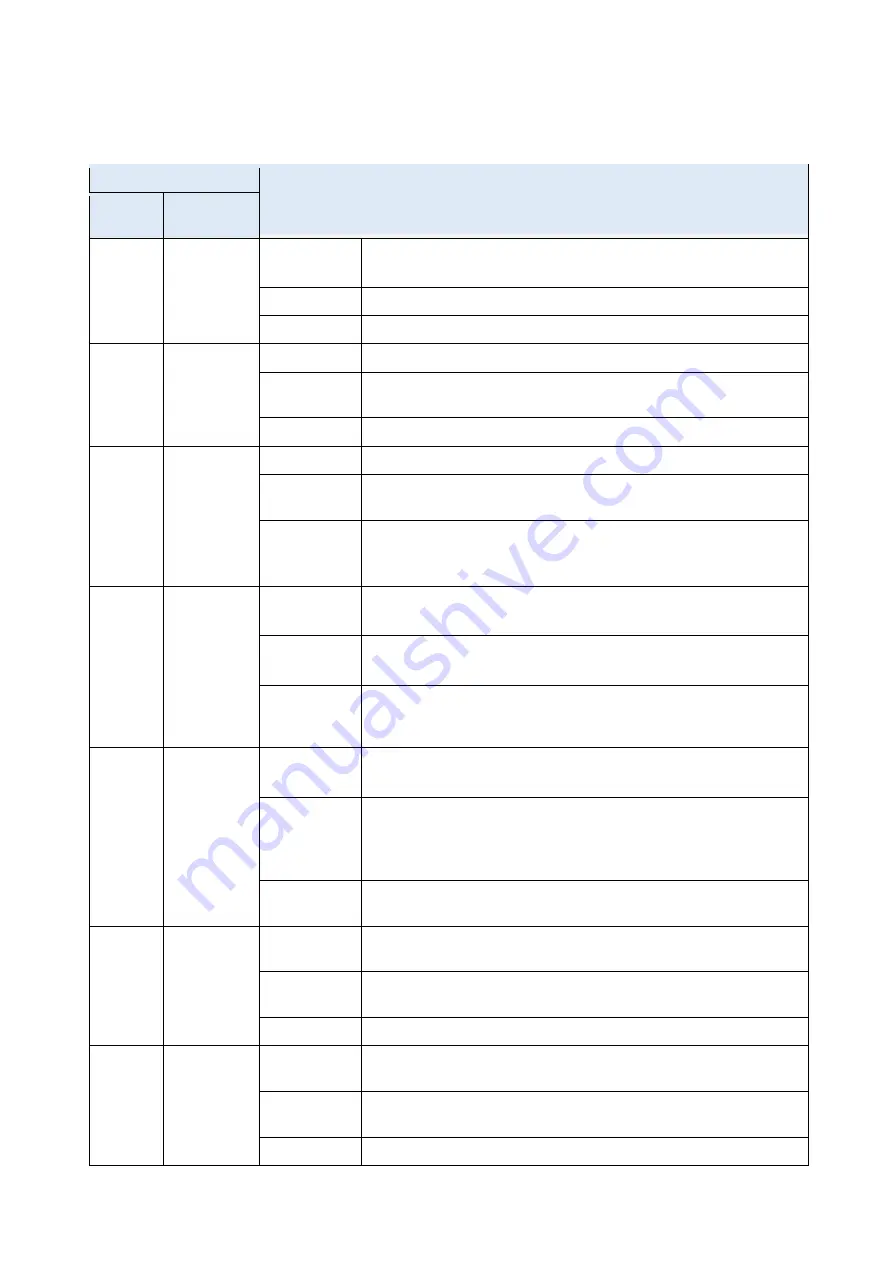
Error No.
Error Cause and Remedy
First 4
Digits
Last 5
Digits
L1864
00000
Err. message FTP parameter setting error (**)
*) "**" is substituted with the "parameter name".
Cause
The FTP communication parameter setting lies outside the range.
Remedy
Check the setting and correct.
L2750
01n00
n=Mech.
No.
Err. message Unable to disable force sense control. (Tracking being performed)
Cause
Unable to disable force sense control while tracking function being
executed.
Remedy
Try again after disabling the tracking function.
H.2760
00n00
n= Mech.
No.
Err. message The force sense control offset limit was reached.
Cause
The robot attempted to move beyond the force sense control
offset limit.
Remedy
Check whether there is a problem with robot movement while
force sense control is enabled.
(The offset limit is the value set in parameter FSCORMX.)
H.2770
xxn00
xx= Axis
No.
n= Mech.
No.
Err. message Outside offset position movement range (**)
*) "**" is substituted with "±Jn" (n is axis No.)
Cause
The position after force sense control offset lies outside the range.
The robot may have been moved near the movement range limit.
Remedy
Review the movement position or force sense control settings,
and ensure that the offset position does not exceed the
movement range.
H.2780
0xn00
x= Axis No.
n= Mech.
No.
Err. message Offset position speed over (**)
*) "**" is substituted with "Jn" (n is axis No.)
Cause
The speed of movement to the position after offsetting with force
sense control exceeded the speed limit.
The movement speed may be too fast, or the robot may have
been moved at the singular point adjacent.
Remedy
Review the movement speed and movement position, or the force
sense control settings.
L.3110
76n00
n= Mech.
No.
Err. message The force sense control command argument lies outside the
range.
Cause
A value outside the range was set for the force sense control
command argument.
Remedy
Check the argument range and set a correct value.
L.3110
77n00
n= Mech.
No.
Err. message The force sense control status variable argument lies outside the
range.
Cause
A value outside the range was set for the force sense control
status variable argument.
Remedy
Check the argument range and set a correct value.
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































