





























-41-
(3) Maximum offset value (FSCORMX)
This parameter sets the position command offset upper limit for force sense control. If the offset
exceeds this upper limit, an error (H2760) occurs. This acts as a protection function for inadequate
operation or setting, and therefore the required minimum value should be set.
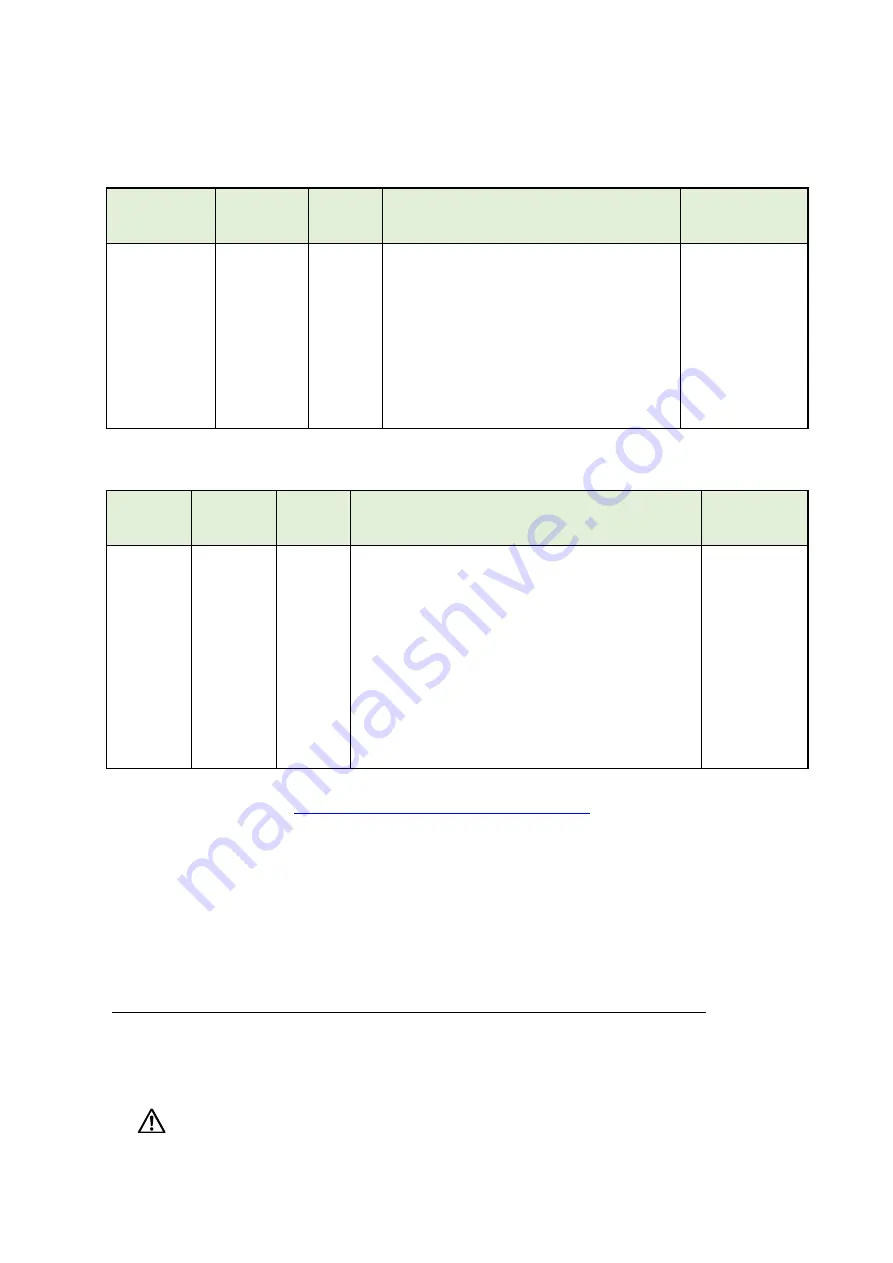
Parameter
Parameter
Name
No. of
Elements
Description
Factory Default
Setting
Force sense
control offset
limit
FSCORMX 2 real
numbers
Sets the maximum position offset for force
sense control.
1st element: Position maximum offset [mm]
2nd element: Posture maximum offset
[deg.]
[Setting range]
1st element: 0 to +200.0
2nd element: 0 to +150.0
10.0, 10.0
(4) Tolerance value (FSLMTMX)
Parameter Parameter
Name
No. of
Elements
Description
Factory
Default Setting
Force
sensor
tolerance
FSLMTMX
6 real
numbers
Sets the force sensor tolerance.
If sensor data exceeding the force and moment set
at this parameter is detected, an error (H7660)
occurs and the robot is stopped.
(Force sense control will be disabled.)
1st element: Force sensor data Fx tolerance [N]
2nd element: Force sensor data Fy tolerance [N]
3rd element: Force sensor data Fz tolerance [N]
4th element: Force sensor data Mx tolerance [N·m]
5th element: Force sensor data My tolerance [N·m]
6th element: Force sensor data Mz tolerance [N·m]
0.0, 0.0, 0.0,
0.0, 0.0, 0.0
* Set the minimum required tolerance for the work being performed, within the force sensor rated
Chapter1 1.1 Force Sensor Specifications
for details on the force sensor
rated value.)
* The force sensor tolerance judgment is based not on the coordinate data converted with parameter
FSXTL, but with raw data (with no offset cancel) sent from the force sensor.
<If force sensor tolerance exceeded>
If error H7660 occurs when the force sensor tolerance setting is exceeded, it will no longer be
possible to turn the servo ON. In such a case, remedy the situation with either of the following
method.
Temporarily clear the error from the T/B, and then retract the robot by JOG operation.
By turning the servo ON and performing JOG operation while holding down the T/B [RESET] key, the
error is temporarily cleared, allowing the robot to be moved. Move the robot to a position at which the
error does not occur.
If a value larger than the force sensor rated value is applied, it may
cause damage to the sensor.
Caution
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































