





























-139-
Exercise 2 : Following operation
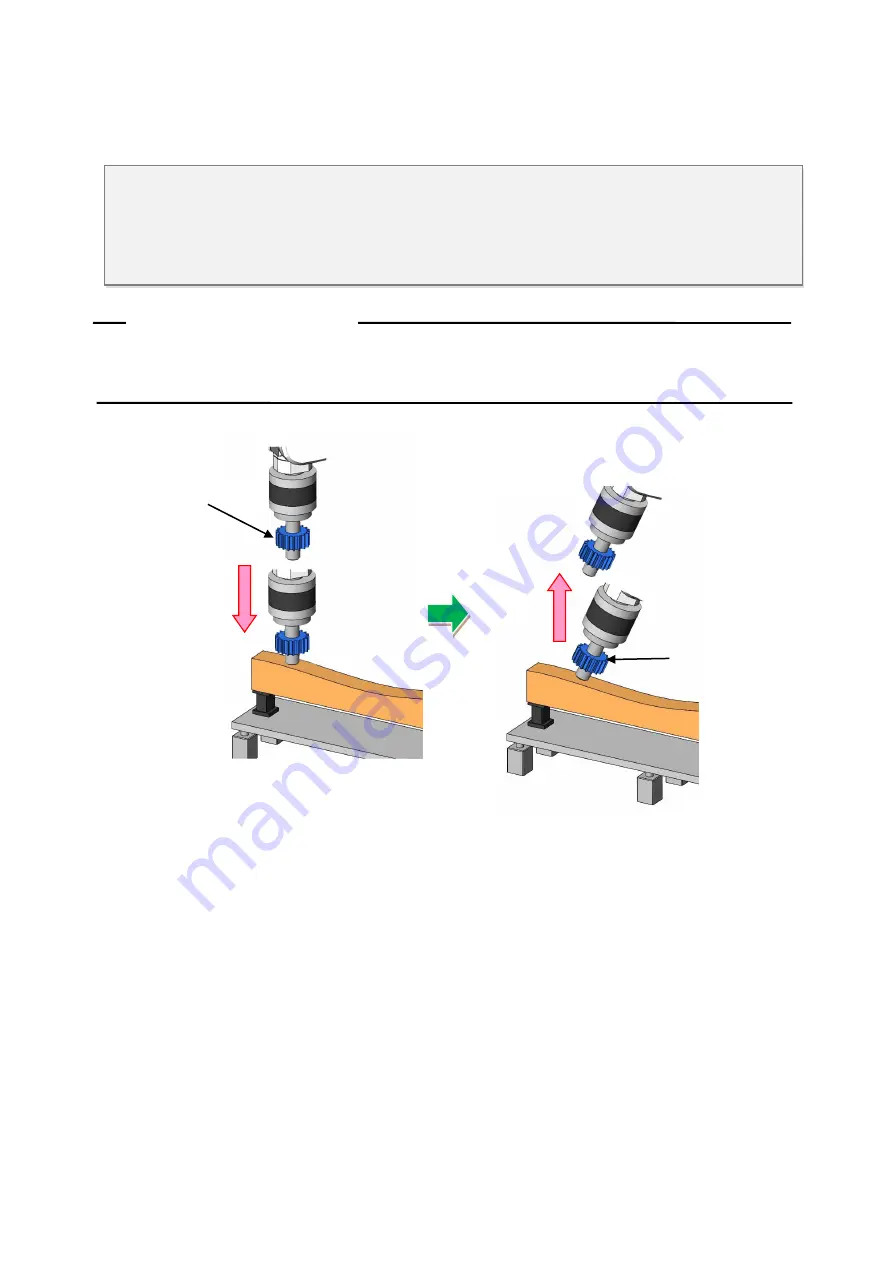
Exercise 2-1 Follow the curved surface
Vertically lower the robot that has performed the hand alignment from the Z-axis direction for the
fixture with a curve. Follow the curved part and read the position where the robot has stopped to
the position variable.
Then create a program to retract to the above position.
Learn how to teach the appropriate posture and position with the force sensor.
Check whether the robot reached the appropriate taught position in shortest time by a method that
cannot be performed with the Dly command.
Key learning points
PStart
PTeach
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































