
















-199-
Appendix 8.5 Q&A
Cause
Measures
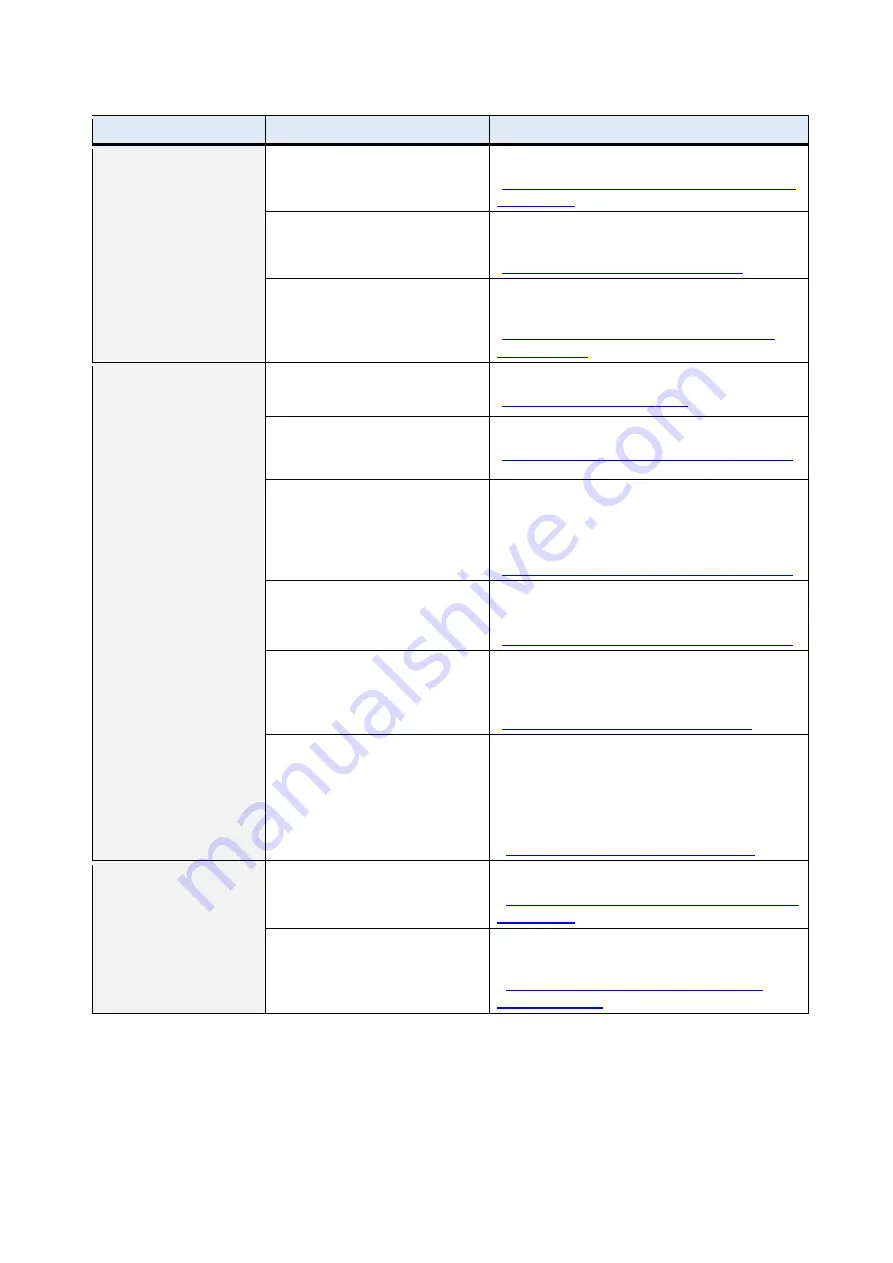
The robot vibrates
during the force
sense control.
Force sense control gain is high. Decrease the force sense control gain.
Chapter5 5.4 (8) Specifying the force sense
The response sensitivity of the
sensor is high.
Increase the filter time constant of the force
sensor data.
(
Chapter4 4.4 (5) Filter time constant
The minimum control force is
small.
Increase the minimum control force of the
force sensor.
(
Chapter4 4.4 (6) Force Sensor Minimum
The robot moves to an
unintended direction
during the force sense
control.
Incorrect setting of a
calibration parameter.
Confirm the setting of a calibration parameter.
(
The offset cancel operation
(sensor zero point offset) of
the sensor is not performed.
Perform the offset cancel operation.
(
Chapter5 5.4 (12) Offset cancel designation
The offset cancel operation is
performed before the robot is
completely stopped.
Use the Dly command etc., and wait until the
robot complete stop and the sensor data
become stabilizing, and then perform the offset
cancel operation of the sensor.
(
Chapter5 5.4 (12) Offset cancel designation
The offset cancel operation is
performed when the external
force is applied to the sensor.
Perform the offset cancel operation without
the external force applied to the sensor.
(
Chapter5 5.4 (12) Offset cancel designation
The force from a cable etc. is
applying.
Do not attach in such a way as to prevent
movement of moveable parts of the force
sensor. Confirm the cable fixation place.
(
Chapter2 2.2 Install the Force Sensor
Incorrect attachment of the
sensor.
Confirm followings.
- Contact between the sensor attachment
surface and sensor attachment adapter.
- Tightening torque of the built-in bolt of
sensor.
Chapter2 2.2 Install the Force Sensor
The robot moves like a
bouncing on contact
during the force sense
control.
Force sense control gain is high. Decrease the force sense control gain.
Chapter5 5.4 (8) Specifying the force sense
Operating speed on contact is
high.
When a contact object is hard, decrease the
operating speed at the time of contact.
Chapter5 5.4 (9) Specifying the speed
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......

































































