




























-62-
(7) Specifying the force command value and limit value (P_FsFCd0/P_FsFCd, FSFCMD0#)
a) Force command value
Set the force command value for force control (force priority mode). Set the force command value
for each specified axis.
When force control is enabled, the robot moves so that the reactive force specified with the force
command value can be obtained.
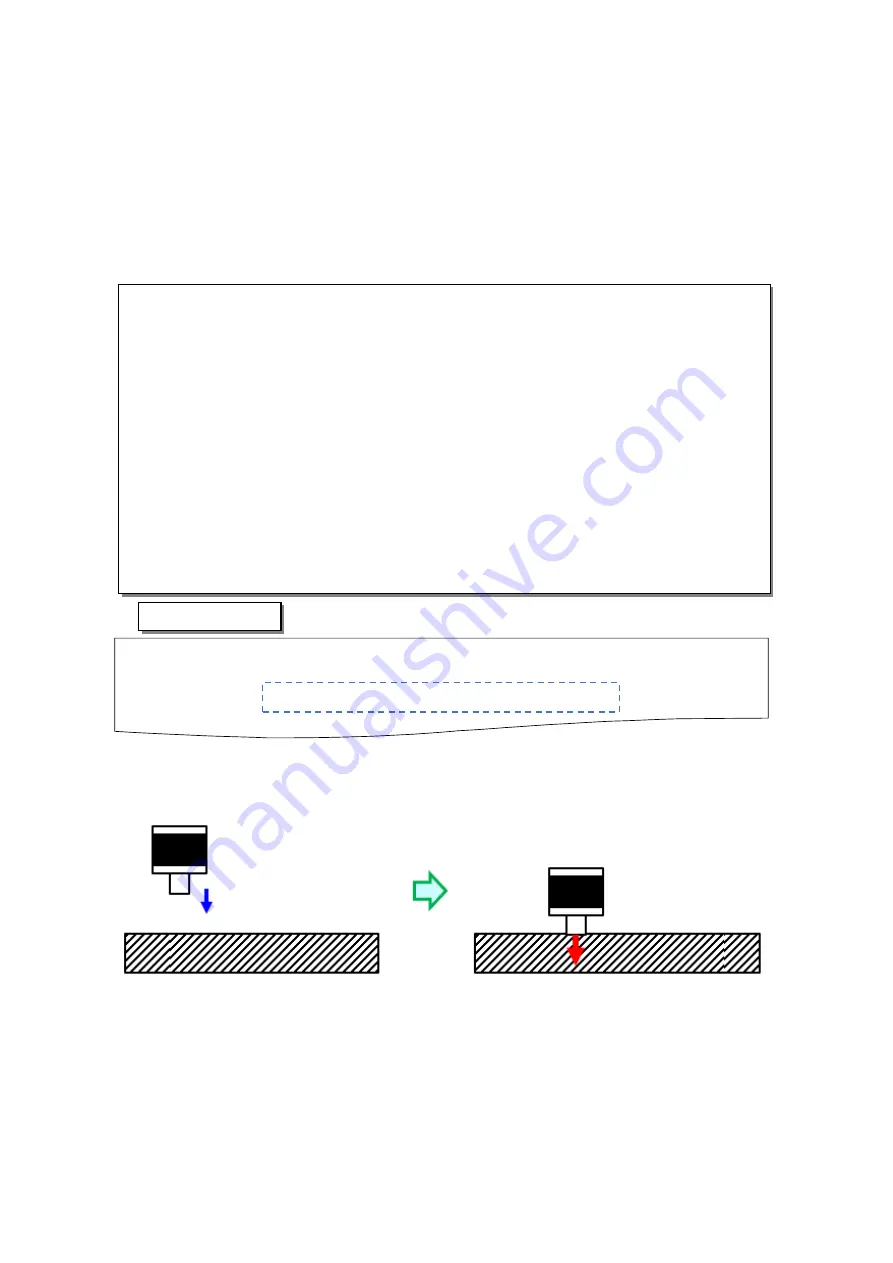
When there is no contact (no force applied), the robot operates to the opposite direction (direction
which the specified force is generated at contact) of the force command value.
<Example>
"+10 N to Z-direction", and the tool coordinate system is set as the control coordinate system
b) Limit value
Sets the limit value for the limited stiffness control. When an external force applies on the arm tip
and the displacement occurs between the teach position and actual position while the limited
stiffness control is enabled, the robot moves to a position at which the reactive force
corresponding to the "displacement" and "stiffness coefficient" can be obtained. In the normal
stiffness control, when the stiffness coefficient or displacement is increased, the
reactive force becomes large. On the other hand, in the limited stiffness control, the force is
automatically controlled so that the reactive force does not exceed the specified limit value.
Since the limit is applied to the command value, as the value of the sensor may temporarily
exceed the limit value.
If the force sense is
enabled without
contact, the tool
moves to the specified
direction.
Maintains 10 N to the
specified direction
after contact.
P_FsFCd0 / P_FsFCd1 = (
△
,
△
,
△
,
△
,
△
,
△
,0,0)(0,0)
At force control:
△
= - (force sensor tolerance value) to + (force sensor tolerance
value)
X, Y, Z · · · [N]
A, B, C · · · [N·m]
L1, L2 · · · Not used
At limited stiffness control:
△
= 0.0 to + (force sensor tolerance value)
X, Y, Z · · · [N]
A, B, C · · · [N·m]
L1 · · · [N], L2 · · · [N·m]
P_FsFCd0=(+0.00,+0.00,+10.00,+0.00,+0.00,+0.00)(0,0)
Force command (specify 10.0 [N] for Z-axis direction)
Program example
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































