




























-75-
(13) Gravity Offset Cancel Function
Gravity offset cancel is a function that the offset cancels in response to a change in the direction of
gravity applied to the force sensor by hand load at the time of posture change. To use this function, it is
necessary to estimate the bias value of the force sensor, position of the center of gravity and the weight
of hand load by the force calibration.
a) Data estimated by the force sensor calibration
Setting item
Description
Status variable,
parameter name
Force sensor
bias value
A constant offset amount generated in the
sensor in no load (by tightening at the
sensor installation).
P_FsBias0
/
P_FsBias1
FSBIAS0#
Load center of
gravity position
The center of gravity position of the load
installed to the force sensor.
P_FsGrPos0
/
P_FsGrPos1
FSGRP0#
Load mass
The mass of the load installed to the force
sensor.
M_FsMass0
/
M_FsMass1
FSMASS0#
(# corresponds to the group number 1 to 8.)
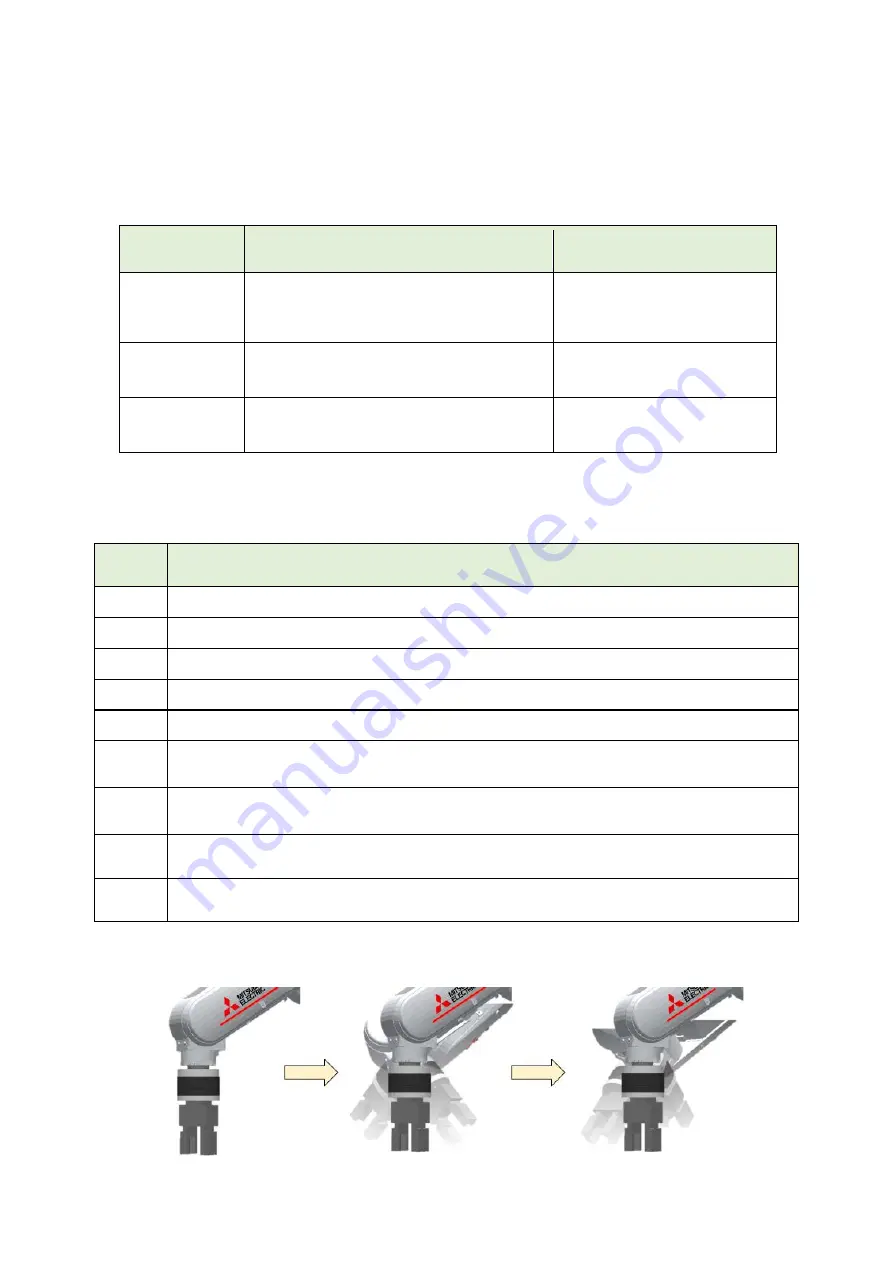
b) Posture required for calibration
The force calibration is required nine postures shown in below.
Posture
No.
Condition
1
Posture that the mechanical interface is parallel to the ground.
2
Posture rotated in +X-axis direction of mechanical interface from posture 1.
3
Posture rotated in -X-axis direction of mechanical interface from posture 1.
4
Posture rotated in +Y-axis direction of mechanical interface from posture 1.
5
Posture rotated in -Y-axis direction of mechanical interface from posture 1.
6
Posture rotated in +X-axis direction of mechanical interface from posture 1.
* Rotate in different angle from posture No.2.
7
Posture rotated in -X-axis direction of mechanical interface from posture 1.
* Rotate in different angle from posture No.3.
8
Posture rotated in +Y-axis direction of mechanical interface from posture 1.
* Rotate in different angle from posture No.4.
9
Posture rotated in -Y-axis direction of mechanical interface from posture 1.
* Rotate in different angle from posture No.5.
Rotate
around X-axis
Rotate
around Y-axis
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































