




























Appendix
Dimensions
FR series
A - 1
A
Appendix
A.1 Dimensions
A.1.1
Working areas of the robot
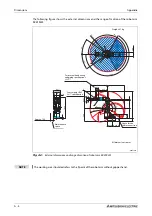
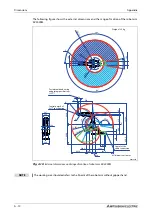
The following figure shows the external dimensions and the range of motion of the robot arm
RV-2FR(B).
R002739E
Fig. A-1:
External dimensions and range of motion of robot arm RV-2FR(B)
NOTE
The working area stipulated refers to the P point of the robot arm without gripper hand.
R139.5
+240°
-240°
R505
(185)
80
75
100
P
160
(80)
(80)
623
5
85
140
+120°
389.6
-120°
799.6
94.6
230
50
504.6
70
504.6
504.6
R504.6
R139.5
270
295
64
P
R
≥
300
Weight: 19 kg
Solenoid valve (option)
Installation space
Solenoid valve (option)
Installation space
All dimensions in mm
Summary of Contents for MELFA RH-FRH-D
Page 2: ......
Page 4: ......
Page 6: ......
Page 16: ...Contents X ...
Page 22: ...Environmental conditions for operation Introduction 1 6 ...
Page 70: ...Grounding the robot system Installation 3 32 ...
Page 90: ...Teaching Box connection Connection 4 20 ...
Page 96: ...Switch on the robot system Startup 5 6 ...
Page 128: ...Dimensions Appendix A 18 ...
Page 130: ...A 20 Index Appendix ...
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 151: ......
Page 152: ......
Page 153: ......
Page 154: ......
Page 155: ......
Page 156: ......
Page 157: ......
Page 158: ......
Page 159: ......
Page 160: ......
Page 161: ......
Page 162: ......
Page 163: ......
Page 164: ......
Page 165: ......







































































