

























Operation of Teaching Box (R32TB)
Menu tree
FR series
6 - 1
6
Operation of Teaching Box (R32TB)
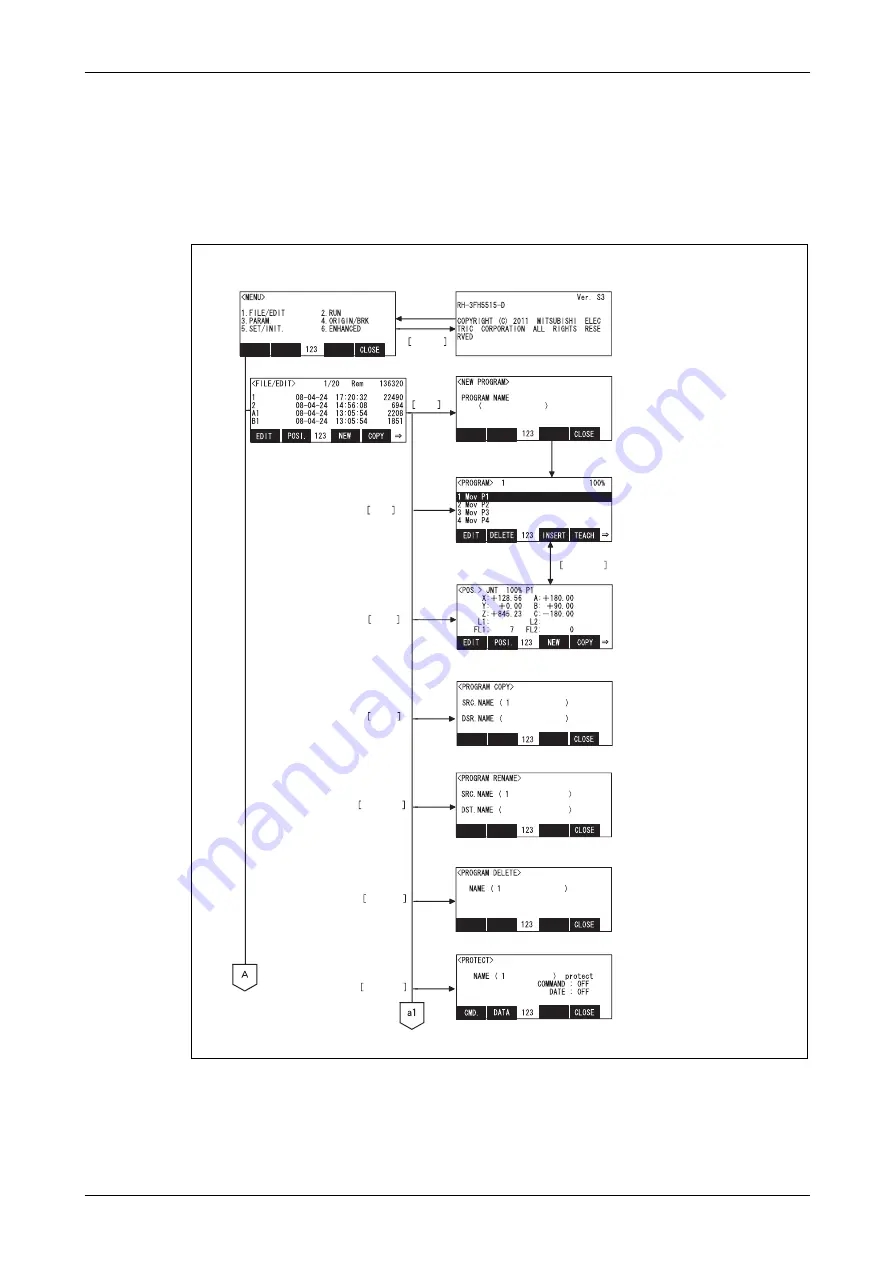
This section describes the operation of the Teaching Box and the functions of the individual menus.
6.1 Menu
tree
R002758E
Fig. 6-1:
Menu tree (1)
[EXE]
CLOSE
NEW
EDIT
POSI.
COPY
RENAME
PROECT
DELETE
CHANGE
MELFA CR800-D
MELFA CR800-D
Main menu
Start screen
1. File menu
Menu to input the file name
Menu for
program editing
Copy program
Rename program
Delete program
Protect program
Menu for
position editing
Refer to "separate instruction man-
ual: CR800-R/iQ Platform Support-
ing Extended Function Instruction
Manual (BFP-A3528 for "1.SQ
DIRECT" in "6.ENHANCED".
Summary of Contents for MELFA RH-FRH-D
Page 2: ......
Page 4: ......
Page 6: ......
Page 16: ...Contents X ...
Page 22: ...Environmental conditions for operation Introduction 1 6 ...
Page 70: ...Grounding the robot system Installation 3 32 ...
Page 90: ...Teaching Box connection Connection 4 20 ...
Page 96: ...Switch on the robot system Startup 5 6 ...
Page 128: ...Dimensions Appendix A 18 ...
Page 130: ...A 20 Index Appendix ...
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 151: ......
Page 152: ......
Page 153: ......
Page 154: ......
Page 155: ......
Page 156: ......
Page 157: ......
Page 158: ......
Page 159: ......
Page 160: ......
Page 161: ......
Page 162: ......
Page 163: ......
Page 164: ......
Page 165: ......







































































