




























5 PARAMETERS
35
5
5
PARAMETERS
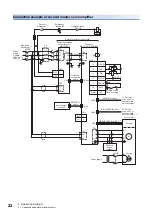
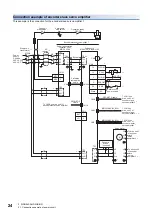
When you connect the drive unit to a servo system controller, servo parameter values of the servo system
controller will be written to each parameter.
Setting may not be made to some parameters and their ranges depending on the servo system controller
model, drive unit software version, and MR Configurator2 software version. For details, refer to the servo
system controller user's manual.
The parameter whose symbol is preceded by * is enabled with the following conditions.
• *: After setting the parameter, cycle the power or reset the controller.
• **: After setting the parameter, cycle the power.
Set a value to each "x" in the "Setting digit" columns.
Do not change parameters during servo-on.
Be sure to set the same setting in parameters of the encoder master servo amplifier and those of the encoder
slave servo amplifiers.
When the parameters are written with MR Configurator2, be sure to be connected via the motion controller. If
parameters are written with MR Configurator2 by directly connecting to the USB port on the drive unit,
parameters in the drive unit and the controller cannot be updated correctly.
For the advanced vibration suppression control II (vibration suppression control tuning) and the adaptive filter
II (adaptive tuning), "Automatic setting" is invalid. Only "Manual setting" is valid.
The following shows parameter settings exclusively for the driver unit. Other parameters are the same as those of MR-J4-
_B_(-RJ). Refer to chapter 5 in "MR-J4-_B_(-RJ) Servo Amplifier Instruction Manual".
[Pr. PA01 Operation mode (**STY)]
For parallel drive systems, the operation mode selection and J3 compatibility mode are unavailable. Do not change those
parameters.
CAUTION
• Never make a drastic adjustment or change to the parameter values as doing so will make the operation unstable.
• Do not change the parameter settings as described below. Doing so may cause an unexpected condition, such as failing to start up the drive unit.
Changing
the values of the parameters for manufacturer setting
Setting a value out of the range
Changing the fixed values in the digits of a parameter
• When you write parameters with the controller, make sure that the control axis No. of the drive unit is set correctly. Otherwise, the parameter settings of
another axis may be written, possibly causing the drive unit to be an unexpected condition.
Setting digit
Explanation
Initial value
_ _ _ x
For manufacturer setting
0h
_ _ x _
Operation mode selection
0: Standard control mode
1: Fully closed loop control mode
4: Linear servo motor control mode
6: DD motor control mode
Setting any value other than "0” will trigger [AL. 37 Parameter error].
0h
_ x _ _
For manufacturer setting
0h
x _ _ _
Compatibility mode selection
For parallel drive systems, the J3 compatibility mode is unavailable. Do not set this digit to "0".
0: J3 compatibility mode
1: J4 mode
1h
Summary of Contents for Melservo-J4 MR-J4-DU*B4-RJ100 Series
Page 2: ......
Page 75: ...9 USING STO FUNCTION 73 9 MEMO ...
Page 81: ...11 APPENDIX 11 1 Analog monitor 79 11 MEMO ...
Page 85: ......







































































