



























172
6 OPTIONS AND PERIPHERAL EQUIPMENT
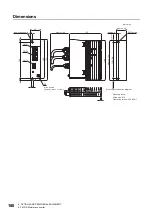
6.2 Regenerative option
MR-RB50/MR-RB5N/MR-RB51
[Unit: mm]
• Terminal block
Screw size: M4
Tightening torque: 1.2 [N•m]
• Mounting screw
Screw size: M6
Tightening torque: 5.4 [N•m]
Regenerative option
Variable dimensions
Mass [kg]
A
B
MR-RB50
17
217
5.6
MR-RB5N
MR-RB51
G4 G3 C P
2.3
49
82.5
200
A
B
8
120
108
12
7
350
162.5
12.5
12.5
82.5
133
162.5
Screw for mounting cooling fan
(2-M3 screw) opposite side
7×14
slotted
hole
Intake
Approx. 30
P
C
G3
G4
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......







































































