




























10 USING A LINEAR SERVO MOTOR
10.4 Basic functions
343
10
■
Absolute position linear encoder
When using an absolute position linear encoder, the data set type homing can also be carried out.
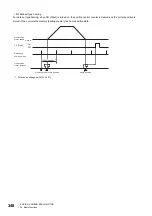
• For proximity dog type homing
For a proximity dog type homing, the nearest reference home position after proximity dog off is the home position. The linear
encoder home position can be set in any position. LZ (Encoder Z-phase pulse) is outputted based on the set value of [Pr.
PL01.2 Homing stop interval setting].
*1 This can be changed with [Pr. PL01].
Homing [A]
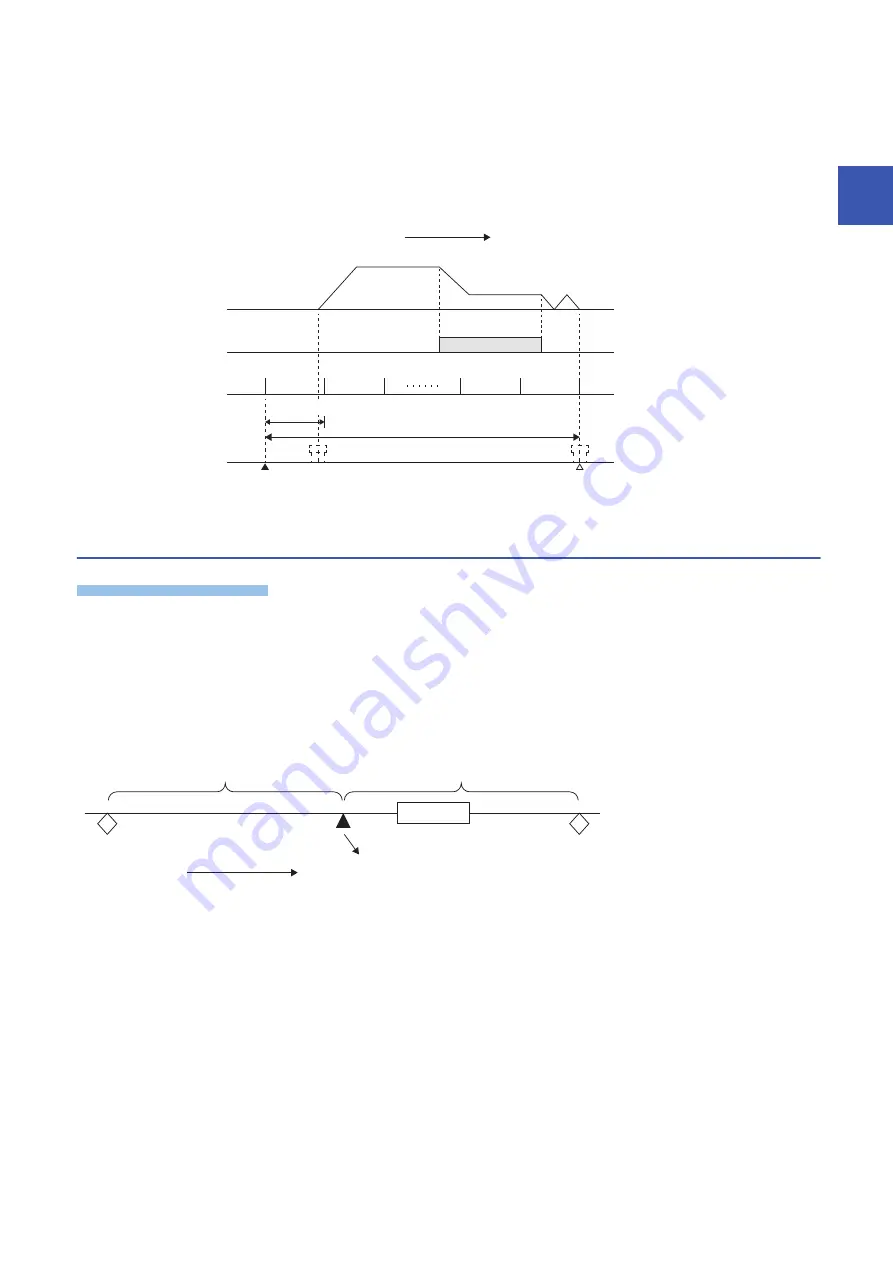
Precautions
• The incremental linear encoder and the absolute position linear encoder have different reference home positions at
homing.
• For the incremental linear encoder, a home position (reference mark) of the linear encoder is necessary in the homing
direction.
• To execute homing securely in the following example, move the linear servo motor to LSN with an operation such as the
JOG operation, then start homing.
ON
OFF
1048576 pulses
*1
0 mm/s
Homing direction
Homing speed
Creep speed
Linear servo motor speed
Proximity dog signal
Reference home position
1048576 pulses × n
Linear servo motor position
Linear encoder home position
Home position
LSN
LSP
Returnable area: Homing is possible when homing
is started from this area.
Non-returnable area: Homing is not possible when homing
is started from this area.
Proximity dog
Homing direction
Home position of linear encoder (reference mark)
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......






































































