



























360
10 USING A LINEAR SERVO MOTOR
10.6 Characteristics
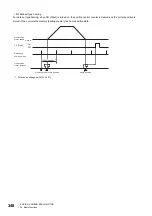
Dynamic brake characteristics
The approximate coasting distance from when the dynamic brake is activated until when the linear servo motor stops can be
calculated with the equation below.
Lmax = V0 • (0.03 + M • (A + B • V02))
Lmax: Coasting distance of the machine [m]
V0: Speed when the brake is activated [m/s]
M: Full mass of the moving part [kg]
A: Coefficient (Refer to the following table.)
B: Coefficient (Refer to the following table.)
Linear servo motor (primary side)
Coefficient A
Coefficient B
LM-H3P2A-07P-BSS0
7.15 × 10
-3
2.94 × 10
-3
LM-H3P3A-12P-CSS0
2.81 × 10
-3
1.47 × 10
-3
LM-H3P3B-24P-CSS0
7.69 × 10
-3
2.27 × 10
-4
LM-H3P3C-36P-CSS0
7.22 × 10
-3
1.13 × 10
-4
LM-H3P3D-48P-CSS0
1.02 × 10
-3
2.54 × 10
-4
LM-H3P7A-24P-ASS0
7.69 × 10
-3
2.14 × 10
-4
LM-H3P7B-48P-ASS0
9.14 × 10
-4
2.59 × 10
-4
LM-H3P7C-72P-ASS0
7.19 × 10
-4
1.47 × 10
-4
LM-H3P7D-96P-ASS0
6.18 × 10
-4
9.59 × 10
-5
LM-U2PAB-05M-0SS0
5.72 × 10
-2
1.72 × 10
-4
LM-U2PAD-10M-0SS0
2.82 × 10
-2
8.60 × 10
-5
LM-U2PAF-15M-0SS0
1.87 × 10
-2
5.93 × 10
-5
LM-U2PBB-07M-1SS0
3.13 × 10
-2
1.04 × 10
-4
LM-U2PBD-15M-1SS0
1.56 × 10
-2
5.18 × 10
-5
LM-U2PBF-22M-1SS0
4.58 × 10
-2
1.33 × 10
-5
LM-U2P2B-40M-2SS0
1.47 × 10
-3
1.27 × 10
-5
LM-U2P2C-60M-2SS0
1.07 × 10
-3
7.66 × 10
-6
LM-U2P2D-80M-2SS0
9.14 × 10
-4
5.38 × 10
-6
LM-FP2B-06M-1SS0
8.96 × 10
-4
1.19 × 10
-3
LM-FP2D-12M-1SS0
5.55 × 10
-4
4.81 × 10
-4
LM-FP2F-18M-1SS0
4.41 × 10
-4
2.69 × 10
-4
LM-FP4B-12M-1SS0
5.02 × 10
-4
4.36 × 10
-4
LM-FP4D-24M-1SS0
3.55 × 10
-4
1.54 × 10
-4
LM-FP4F-36M-1SS0
1.79 × 10
-4
1.36 × 10
-4
LM-FP4H-48M-1SS0
1.15 × 10
-4
1.19 × 10
-4
LM-FP5H-60M-1SS0
1.95 × 10
-4
4.00 × 10
-5
LM-K2P1A-01M-2SS1
5.36 × 10
-3
6.56 × 10
-3
LM-K2P1C-03M-2SS1
1.17 × 10
-3
3.75 × 10
-4
LM-K2P2A-02M-1SS1
2.49 × 10
-2
1.02 × 10
-3
LM-K2P2C-07M-1SS1
6.85 × 10
-4
2.80 × 10
-4
LM-K2P2E-12M-1SS1
5.53 × 10
-4
1.14 × 10
-4
LM-K2P3C-14M-1SS1
2.92 × 10
-4
1.16 × 10
-4
LM-K2P3E-24M-1SS1
2.53 × 10
-4
5.52 × 10
-5
LM-AJP1B-07K-JSS0
6.85 × 10
-3
3.70 × 10
-3
LM-AJP1D-14K-JSS0
4.08 × 10
-2
3.42 × 10
-4
LM-AJP2B-12S-JSS0
3.42 × 10
-3
2.06 × 10
-3
LM-AJP2D-23T-JSS0
1.35 × 10
-2
2.48 × 10
-4
LM-AJP3B-17N-JSS0
2.24 × 10
-3
1.47 × 10
-3
LM-AJP3D-35R-JSS0
6.61 × 10
-3
2.23 × 10
-4
LM-AJP4B-22M-JSS0
1.65 × 10
-3
1.12 × 10
-3
LM-AJP4D-45N-JSS0
4.03 × 10
-3
1.94 × 10
-4
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......







































































