





























3 SIGNALS AND WIRING
3.5 Signal (device) explanation
71
3
Input device explanation
■
EM2 (Forced stop 2)
Turn off EM2 (open between commons) to decelerate the servo motor to a stop with commands.
Turn on EM2 (short between commons) in the forced stop state to deactivate that state.
When not using EM2, set [Pr. PA04.3] to "2".
EM2 and EM1 are mutually exclusive. When the MR-J5-_G_ or MR-J5W_-_G is used in the torque mode, EM2 functions the
same as EM1.
*1 For the MR-J5-_A_ servo amplifier, the setting value of this servo parameter is fixed to "0". To disable forced stop, change the setting
value of [Pr. PD01.3].
■
EM1 (Forced stop 1)
When using EM1, set [Pr. PA04.3] to "0".
When EM1 is turned off (open between commons), the base circuit shuts off, and the dynamic brake operates to decelerate
the servo motor to a stop.
The forced stop will be deactivated if EM1 is turned on (short between commons) while in the forced stop state.
■
LSP (Forward rotation stroke end)/LSN (Reverse rotation stroke end)
To operate a servo motor, turn on LSP/LSN. Turn LSP/LSN off to bring the servo motor to a stop and switch it to the servo-lock
state.
For information about areas such as the supported control modes, automatic on, and restrictions, refer to "Stroke limit
function" in the following user's manual.
MR-J5 User's Manual (Function)
■
PC (Proportional control)
Turn PC on to switch the speed amplifier from the proportional integral type to the proportional type.
If a servo motor is rotated even for a pulse due to any external factor while it is at a stop, it generates torque to compensate for
a position mismatch. If locking the servo motor shaft mechanically after positioning completes, turn on PC (Proportional
control) upon completion of positioning to suppress the unnecessary torque generated for compensation of a position
mismatch.
If locking the shaft for a long period of time, set the torque value to be the rated torque or less.
Do not use PC in the torque mode. If PC is used in the torque mode, the servo motor may operate at a speed exceeding the
speed limit value.
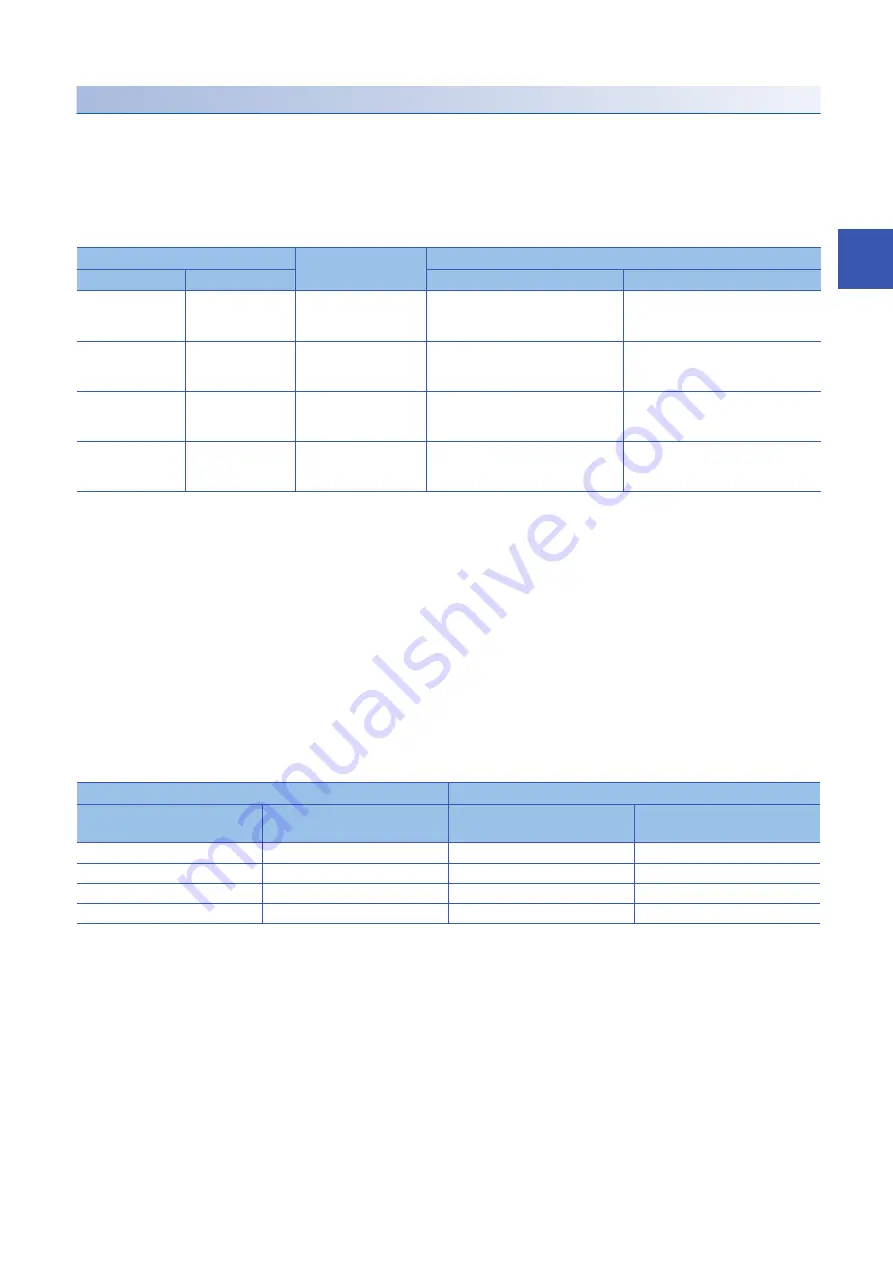
Setting value
EM2/EM1
Deceleration method
[Pr. PA04.3]
[Pr. PA04.2]
EM2 or EM1 is off
Alarm occurrence
0
0
EM1
MBR (Electromagnetic brake interlock)
turns off without the forced stop
deceleration.
MBR (Electromagnetic brake interlock)
turns off without the forced stop
deceleration.
2
0
EM2
MBR (Electromagnetic brake interlock)
turns off after the forced stop
deceleration.
MBR (Electromagnetic brake interlock)
turns off after the forced stop
deceleration.
0
1
Neither EM2 nor EM1 is
used.
MBR (Electromagnetic brake interlock)
turns off without the forced stop
deceleration.
2
1
Neither EM2 nor EM1 is
used.
MBR (Electromagnetic brake interlock)
turns off after the forced stop
deceleration.
Input device
Operation
LSP
LSN
CCW direction (positive
direction)
CW direction (negative
direction)
1 (on)
1 (on)
0 (off)
1 (on)
1 (on)
0 (off)
0 (off)
0 (off)
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......







































































