



























4 - 4
4. OPERATION AND FUNCTIONS
4.1.5 Setting of feedback pulse electronic gear
POINT
If setting a wrong value in the feedback pulse electronic gear (parameter
No.PE04, PE05, PE34, PE35), a parameter error (37) and an abnormal
operation may occur. Also, a fully closed loop control error (42) may occur
during the positioning operation.
The numerator (parameter No.PE04, PE34) and denominator (parameter No.PE05, PE35) of the electronic
gear are set to the motor side encoder pulse. Set the electronic gear so that the number of motor encoder
pulses per motor revolution is converted to the number of load side encoder pulses. The relational expression
is shown below.
Parameter No.PE04 Parameter No.PE34 Number of load side encoder pulses per servo motor revolution
Parameter No.PE05 Parameter No.PE35 Number of motor encoder pulses per servo motor revolution
Select the load side encoder so that the number of load side encoder pulses per servo motor revolution is
within the following range.
4096 (2
12
) Number of load side encoder pulses per servo motor revolution 67108864 (2
26
)
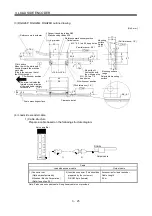
(1) When the servo motor is directly coupled with a ball screw and the linear encoder resolution is 0.05m
Condition
Servo motor resolution: 262144pulse/rev
Servo motor reduction ratio: 1/11
Ball screw lead: 20mm
Linear encoder resolution: 0.05 m
Servo motor with reduction gear
Table
Linear encoder
Head
Number of linear encoder pulses per ball screw revolution is calculated.
Number of linear encoder pulses per ball screw revolution
Ball screw lead/Linear encoder resolution
20mm/0.05 m 400000pluse
400000
262144
1) 3125
3) 22528
1
11
2) 1
4) 1
1) Parameter No.PE04 2) Parameter No.PE34
3) Parameter No.PE05 4) Parameter No.PE35
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































