





























4 - 8
4. OPERATION AND FUNCTIONS
4.2 Home position return operation
4.2.1 General precautions
Home position return operation is all performed according to the load side encoder feedback data,
independently of the load side encoder type. It is irrelevant to the Z-phase position of the motor encoder.
In the case of a home position return using a dog signal, the scale home position (reference mark) must be
passed through when an incremental type linear encoder is used, or the Z-phase be passed through when a
rotary encoder is used, during a period from a home position return start until the dog signal turns off.
4.2.2 Load side encoder types and home position return methods
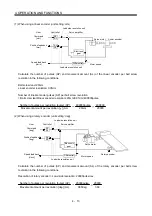
(1) About proximity dog type home position return using absolute linear encoder
When an absolute linear encoder is used, the home position reference position is the position per servo
motor revolution to the linear encoder home position (absolute position data = 0).
In the case of a proximity dog type home position return, the nearest position after proximity dog OFF is the
home position.
The linear encoder home position may be set in any position.
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Home position
return operation
Home position
reference position
Machine position
Equivalent to one servo motor revolution
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































