



























7 - 5
7. OUTLINE DRAWINGS
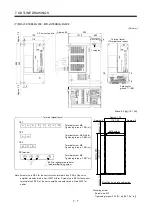
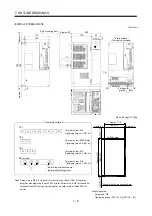
(5) MR-J3-200B(4)-RJ006
POINT
Connectors (CNP1, CNP2, and CNP3) and appearance of MR-J3-200B-
RJ006 servo amplifier have been changed from April 2008 production. For
existing servo amplifier, refer to appendix 4.
[Unit: mm]
Cooling fan
wind direction
CNP2
CNP3
CNP1
Approx. 80
195
Approx. 25.5
6
6
78
6
45
90
85
6 mounting hole
6
Mass: 2.1 [kg] (4.63 [lb])
U
V
W
CNP3
P
C
D
L
11
L
21
CNP2
L
1
L
2
L
3
N
P
1
P
2
CNP1
Screw size: M4
Tightening torque: 1.2[N m]
Terminal signal layout
PE terminal
Approx. 90
78 0.3
Approx. 6
Approx. 6
3-M5 screw
Mounting hole process drawing
Mounting screw
Screw size: M5
Tightening torque: 3.24 [N m]
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































