


























3 - 28
3. LOAD SIDE ENCODER
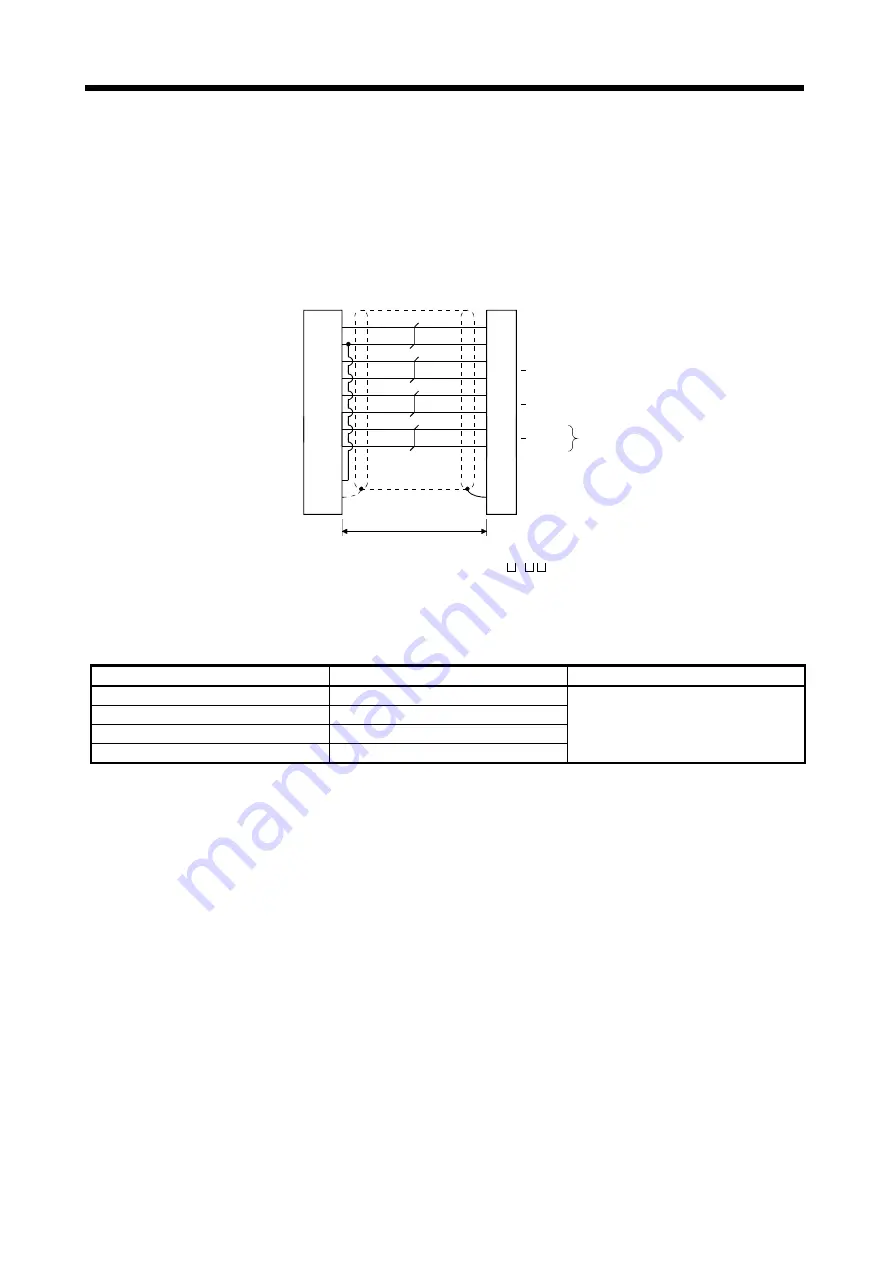
(3) Internal wiring diagram
For production of the load side encoder cable, use a cable durable against the long period of flexing action.
Even though the cable length is max. 30m for the RS-422 communication, the length may be shortened
due to the power supply voltage drop or the specifications of linear encoder.
A connection example is shown below. For details, contact with the encoder manufacturer.
1) When the consumption current of the load side encoder is 350mA or less
B-phase
P5
LG
1
2
PZ
PZR
7
8
Connector on
the servo amplifier side
ABZ-phase differential
output load side encoder
10
SD
Plate
5V
3
4
5
6
9
PA
PAR
PB
PBR
0V
A-phase
A-phase
B-phase
Z-phase
Z-phase
(Note 1)
30m or less
(Note 2)
Shield
PSE
(Note 3)
Note 1. For the load side encoder without Z-phase, set parameter No.PC27 to " 1
".
2. Securely connect a shield cable to the plate (ground plate) in the connector.
3. The following table shows the cable size to be used and the number of paired connections of LG and P5 when the consumption
current of the load side encoder is 350mA. When the consumption current of the load side encoder is 350mA or less, the paired
connections can be decreased.
Wiring length
Number of LG and P5 connections
Cable size
to 5m
2-pair
to 10m
3-pair
to 20m
6-pair
to 30m
8-pair
AWG22
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...






































































