





















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 20
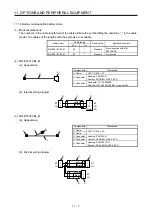
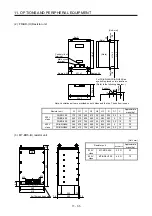
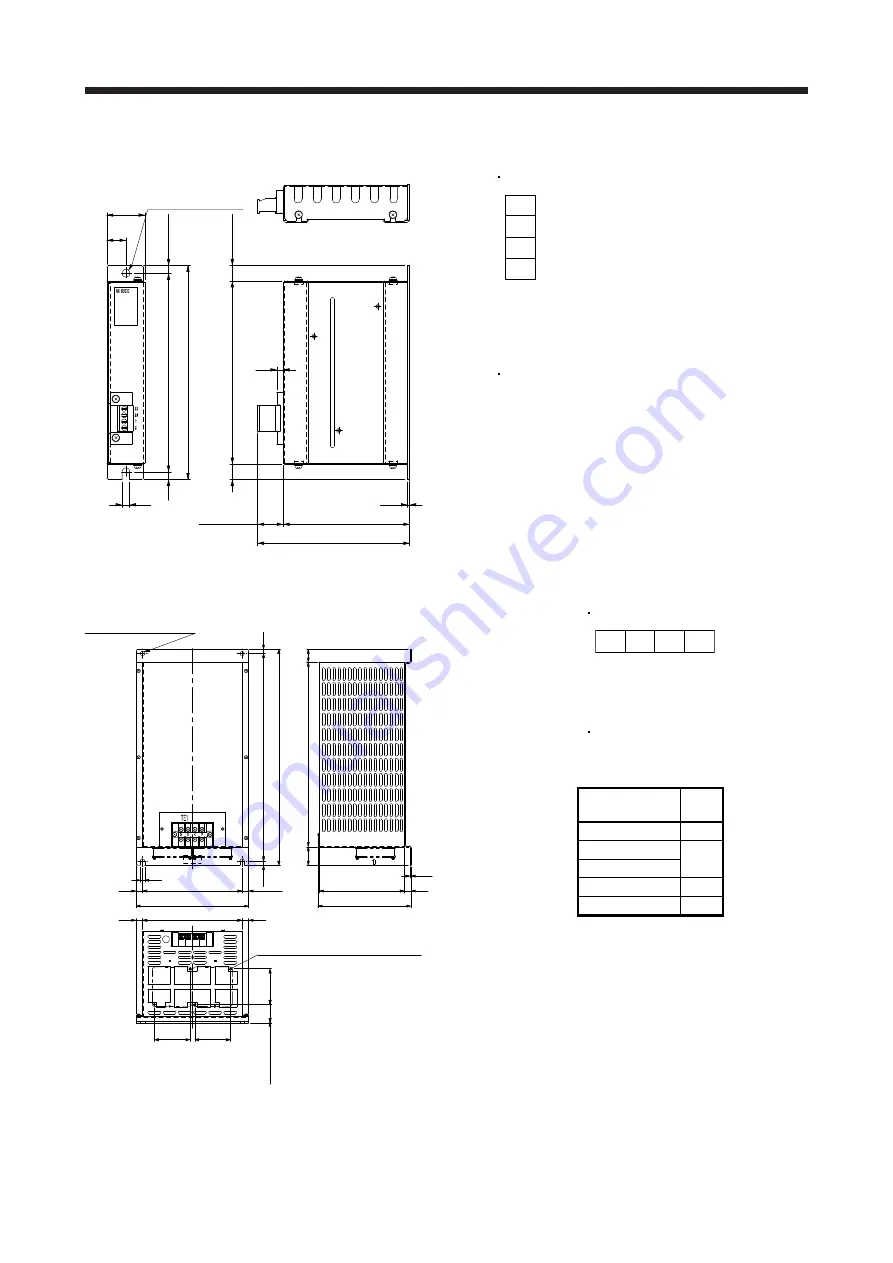
(4) MR-RB032
[Unit: mm]
TE1
30
15
99
1.6
119
144
12
156
168
6
6
5
Approx. 6
Approx. 12
Approx. 20
φ
6 mounting hole
TE1 terminal
G3
G4
P
C
Applicable wire size: 0.2 mm
2
to 2.5 mm
2
(AWG 24 to 12)
Tightening torque: 0.5 to 0.6 [N•m]
Mounting screw
Screw size: M5
Tightening torque: 3.24 [N•m]
Mass: 0.5 [kg]
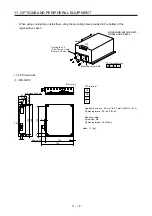
(5) MR-RB5R/MR-RB9F/MR-RB9T/MR-RB5K-4/MR-RB6K-4
[Unit: mm]
480
10
260
230
10
2-
φ
10 mounting hole
500
30
427
43
197
15
2.3
Cooling fan intake
215
15
230
15
10
15
15
82.5
82.5
82.5
Approx. 42
Screw for mounting cooling fan
4-M3 screw
TE1 terminal block
P
C
G3
G4
Terminal screw size: M5
Tightening torque: 2.0 [N•m]
Mounting screw
Screw size: M8
Tightening torque: 13.2 [N•m]
Regenerative
option
Mass
[kg]
MR-RB5R 10
MR-RB9F
11
MR-RB9T
MR-RB5K-4 10
MR-RB6K-4 11
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































