



























5. PARAMETERS
5 - 2
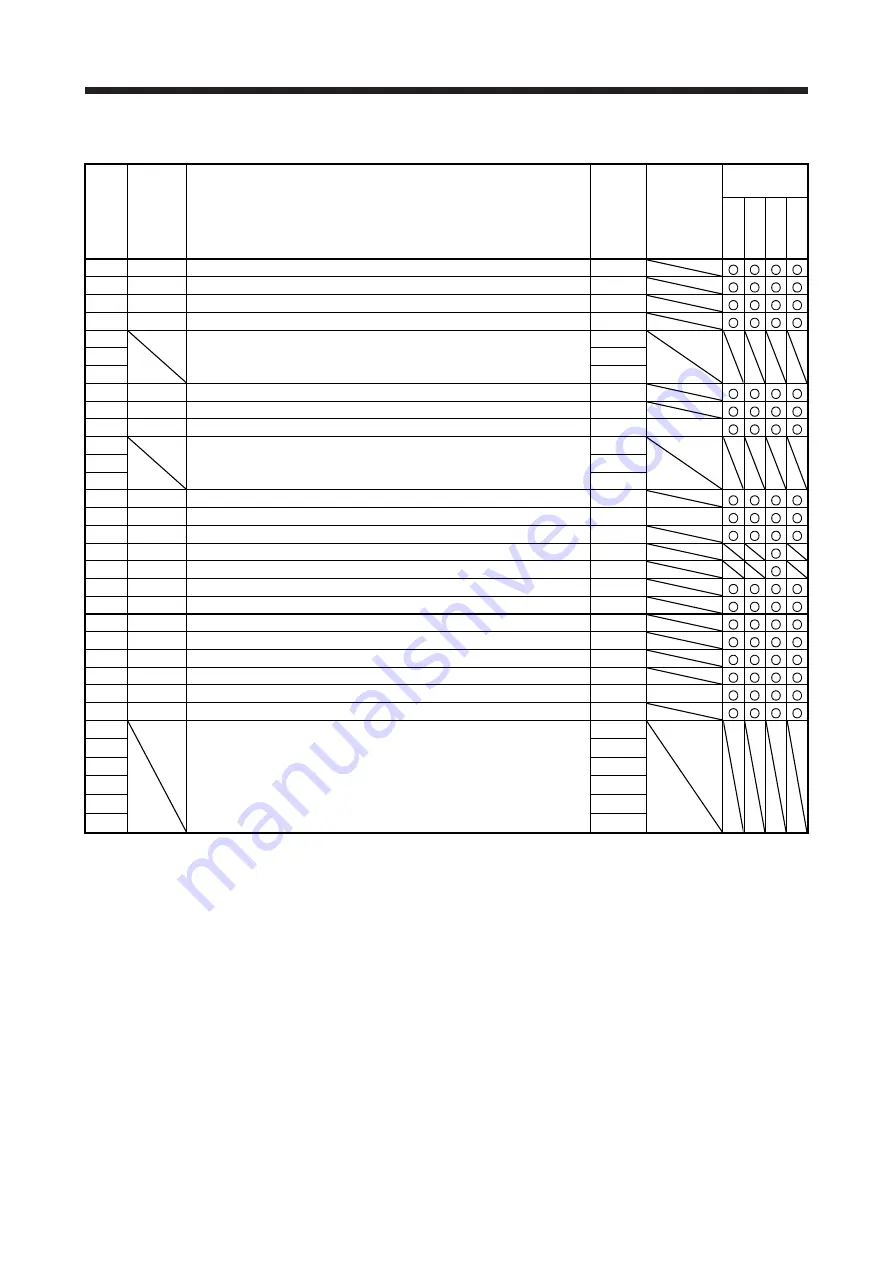
5.1.1 Basic setting parameters ([Pr. PA_ _ ])
No. Symbol
Name
Initial
value
Unit
Operation
mode
Standard
F
ull.
Lin.
D.D.
PA01 **STY Operation
mode
1000h
PA02 **REG Regenerative
option
0000h
PA03
*ABS
Absolute position detection system
0000h
PA04
*AOP1 Function selection A-1
2000h
PA05 For manufacturer setting
10000
PA06
1
PA07
1
PA08
ATU
Auto tuning mode
0001h
PA09
RSP
Auto tuning response
16
PA10 INP In-position
range
1600 [pulse]
PA11 For manufacturer setting
1000.0
PA12
1000.0
PA13
0000h
PA14
*POL
Rotation direction selection/travel direction selection
0
PA15
*ENR
Encoder output pulses
4000
[pulse/rev]
PA16
*ENR2 Encoder output pulses 2
1
PA17
**MSR
Servo motor series setting
0000h
PA18
**MTY
Servo motor type setting
0000h
PA19
*BLK
Parameter writing inhibit
00ABh
PA20
*TDS
Tough drive setting
0000h
PA21
*AOP3 Function selection A-3
0001h
PA22
**PCS
Position control composition selection
0000h
PA23
DRAT
Drive recorder arbitrary alarm trigger setting
0000h
PA24
AOP4
Function selection A-4
0000h
PA25 OTHOV One-touch tuning - Overshoot permissible level
0
[%]
PA26
*AOP5 Function selection A-5
0000h
PA27 For manufacturer setting
0000h
PA28
0000h
PA29
0000h
PA30
0000h
PA31
0000h
PA32
0000h
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
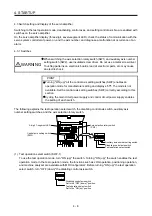
Page 143: ...4 STARTUP 4 20 MEMO ...
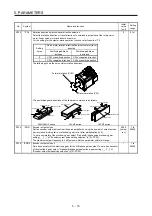
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































