




























5. PARAMETERS
5 - 37
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
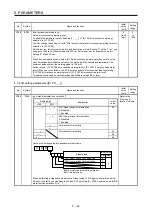
PC09
MOD1
Analog monitor 1 output
Select a signal to output to MO1 (Analog monitor 1). Refer to app. 11.3 for detection point of
output selection.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x
Analog monitor 1 output selection
Refer to table 5.7 for settings.
00h
_ x _ _
For manufacturer setting
0h
x _ _ _
0h
Table 5.7 Analog monitor setting value
Setting
value
Item
Operation
mode (Note 1)
Standard
F
ull.
Lin.
D.D.
_ _ 0 0 (Linear) servo motor speed
(±8 V/max. speed)
_ _ 0 1 Torque or thrust
(±8 V/max. torque or max. thrust)
_ _ 0 2 (Linear) servo motor speed
(+8 V/max. speed)
_ _ 0 3 Torque or thrust
(+8 V/max. torque or max. thrust)
_ _ 0 4 Current command (±8 V/max. current command)
_ _ 0 5 Speed command (±8 V/max. speed)
_ _ 0 6 Servo motor-side droop pulses (±10 V/100 pulses) (Note 2)
_ _ 0 7 Servo motor-side droop pulses (±10 V/1000 pulses) (Note 2)
_ _ 0 8 Servo motor-side droop pulses (±10 V/10000 pulses) (Note 2)
_ _ 0 9 Servo motor-side droop pulses (±10 V/100000 pulses) (Note 2)
_ _ 0 A Feedback position (±10 V/1 Mpulse) (Note 2)
_ _ 0 B Feedback position (±10 V/10 Mpulses) (Note 2)
_ _ 0 C Feedback position (±10 V/100 Mpulses) (Note 2)
_ _ 0 D Bus voltage (200 V class and 100 V class: +8 V/400 V, 400 V
class: +8 V/800 V)
_ _ 0 E Speed command 2 (±8 V/max. speed)
_ _ 1 0 Load-side droop pulses (±10 V/100 pulses) (Note 2)
_ _ 1 1 Load-side droop pulses (±10 V/1000 pulses) (Note 2)
_ _ 1 2 Load-side droop pulses (±10 V/10000 pulses) (Note 2)
_ _ 1 3 Load-side droop pulses (±10 V/100000 pulses) (Note 2)
_ _ 1 4 Load-side droop pulses (±10 V/1 Mpulse) (Note 2)
_ _ 1 5 Servo motor-side/load-side position deviation
(±10 V/100000 pulses)
_ _ 1 6 Servo motor-side/load-side speed deviation
(±8 V/max. speed)
_ _ 1 7 Internal temperature of encoder (±10 V/±128
˚
C)
Note 1. Items with are available for each operation mode.
Standard: Standard (semi closed loop system) use of the rotary servo motor
Full.: Fully closed loop system use of the rotary servo motor
Lin.: Linear servo motor use
D.D.: Direct drive (D.D.) motor use
2. Encoder pulse unit
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































