



























5. PARAMETERS
5 - 42
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
PC38
ERW
Error excessive warning level
Set an error excessive warning level.
To enable the parameter, select "Enabled (1 _ _ _)" of "[AL. 9B Error excessive warning]
selection" in [Pr. PC05].
You can change the setting unit with "Error excessive alarm/error excessive warning level unit
selection" in [Pr. PC06].
Set this per rev. for rotary servo motors and direct drive motors. Setting "0" will be "1 rev", and
setting over 200 rev will be clamped with 200 rev. Set this per mm for linear servo motors.
Setting "0" will be 50 mm.
When an error reaches the set value, [AL. 9B Error excessive warning] will occur. When the
error decreases lower than the set value, the warning will be canceled automatically. The
minimum pulse width of the warning signal is 100 [ms].
Set as follows.: [Pr. PC38 Error excessive warning level] < [Pr. PC01 Error excessive alarm
level] When you set as follows, [AL. 52 Error excessive] will occur earlier than the warning.:
[Pr. PC38 Error excessive warning level]
≥
[Pr. PC01 Error excessive alarm level]
This parameter is used by servo amplifier with software version B4 or later.
0
[rev]/
[mm]
0
to
1000
5.2.4 I/O setting parameters ([Pr. PD_ _ ])
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
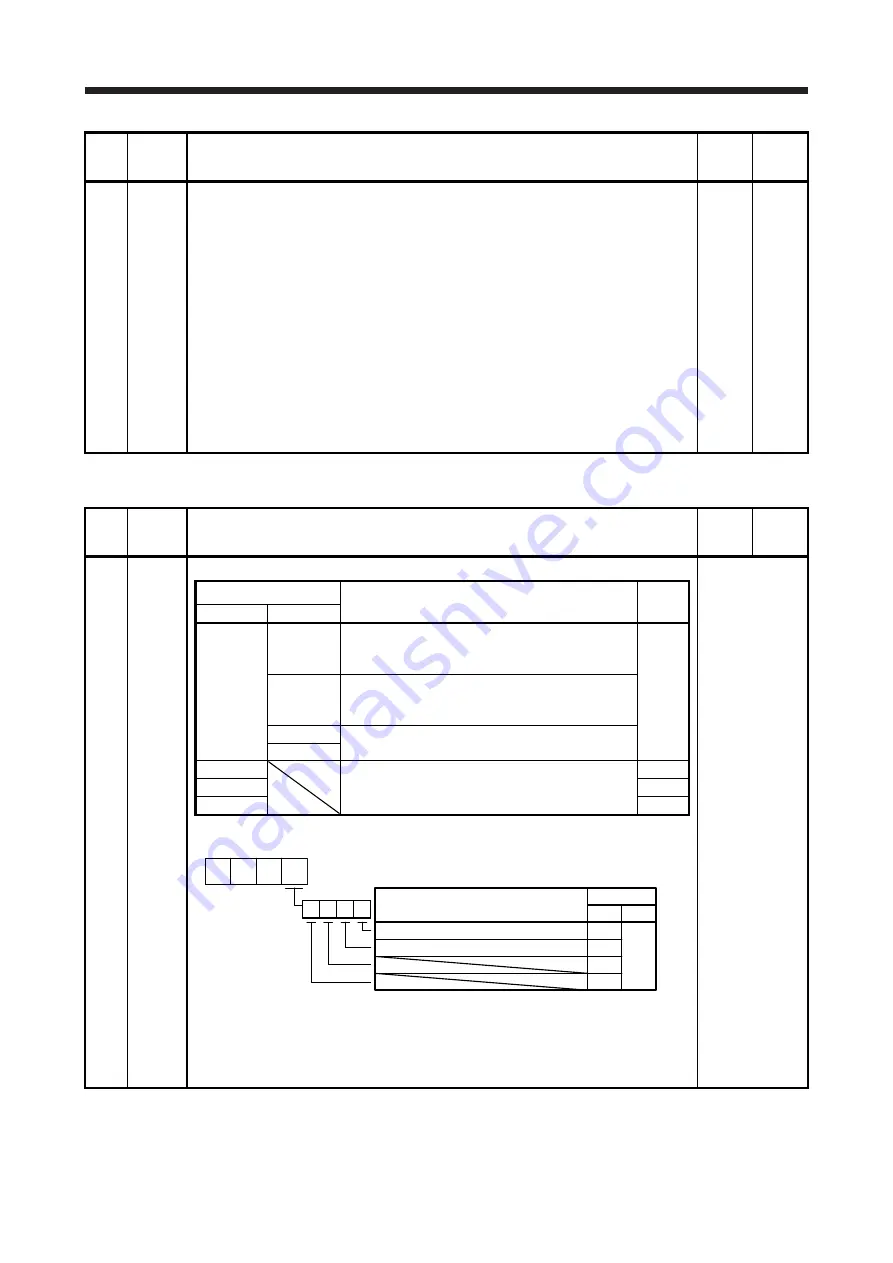
PD02
*DIA2
Input signal automatic on selection 2
Refer to the
"Name and
function" column.
Setting digit
Explanation
Initial
value
HEX. BIN.
_ _ _ x
_ _ _ x
FLS (Upper stroke limit) selection
0: Disabled
1: Enabled
0h
_ _ x _
RLS (Lower stroke limit) selection
0: Disabled
1: Enabled
_ x _ _
For manufacturer setting
x _ _ _
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
Convert the setting value into hexadecimal as follows.
0
BIN 0: Use for an external input signal.
BIN 1: Automatic on
Initial value
BIN HEX
Signal name
0
0
0 0 0
0
0
FLS (Upper stroke limit) selection
RLS (Lower stroke limit) selection
When performing a magnetic pole detection without using FLS (Upper stroke limit) and RLS
(Lower stroke limit), you can disable FLS and RLS by setting [Pr. PL08 Linear servo motor/DD
motor function selection 3] to "_ 1 _ _".
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































