
























17. APPLICATION OF FUNCTIONS
17 - 49
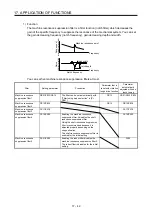
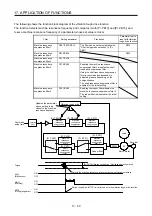
a) When a vibration peak can be confirmed with machine analyzer using MR Configurator2, or
external equipment.
1 Hz
Gain characteristics
Phase
-90 degrees
300 Hz
Vibration suppression control 1 -
Vibration frequency
(anti-resonance frequency)
[Pr. PB19]
Vibration suppression control 1 -
Resonance frequency
[Pr. PB20]
Vibration suppression control 2 -
Vibration frequency
(anti-resonance frequency)
[Pr. PX04]
Vibration suppression control 2 -
Resonance frequency
[Pr. PX05]
Resonance of more than
300 Hz is not the target of control.
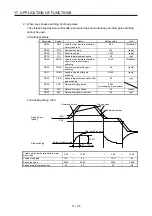
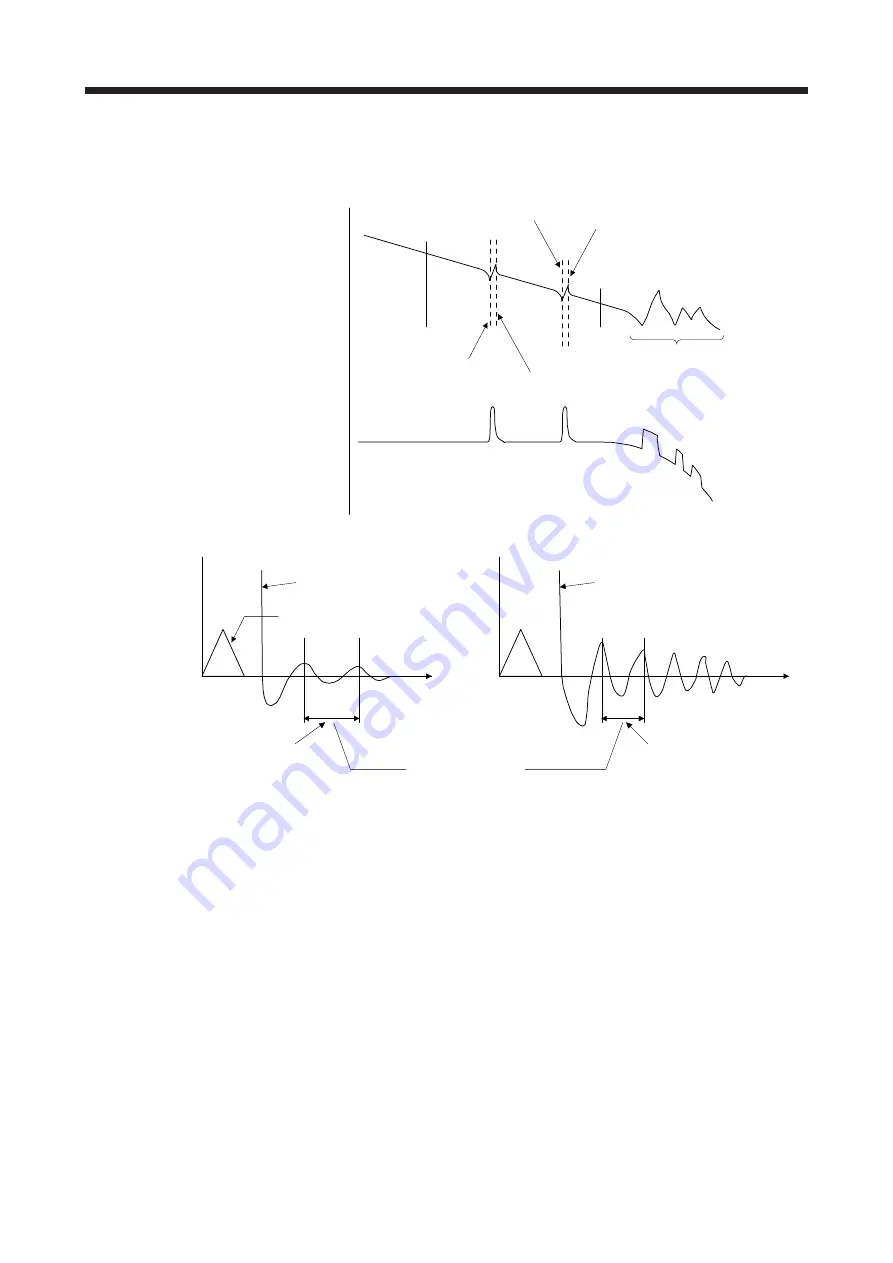
b) When vibration can be confirmed using monitor signal or external sensor
t
Motor-side vibration
(droop pulses)
Position command frequency
t
External acceleration pickup signal, etc.
Vibration suppression control -
Vibration frequency
Vibration suppression control -
Resonance frequency
Set the same value.
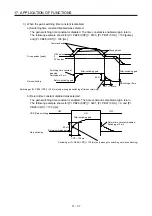
Vibration cycle [Hz]
Vibration cycle [Hz]
Step 3. Fine-adjust "Vibration suppression control - Vibration frequency damping" and "Vibration
suppression control - Resonance frequency damping".
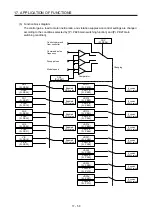
(6) Gain switching function
You can switch gains with the function. You can switch gains during rotation and during stop, and can
use a control command from a controller to switch gains during operation.
(a) Use
The following shows when you use the function.
1) You want to increase the gains during servo-lock but decrease the gains to reduce noise during
rotation.
2) You want to increase the gains during settling to shorten the stop settling time.
3) You want to change the gains using a control command from a controller to ensure stability of the
servo system since the load to motor inertia ratio varies greatly during a stop (e.g. a large load is
mounted on a carrier).
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































