



























APPENDIX
App. - 61
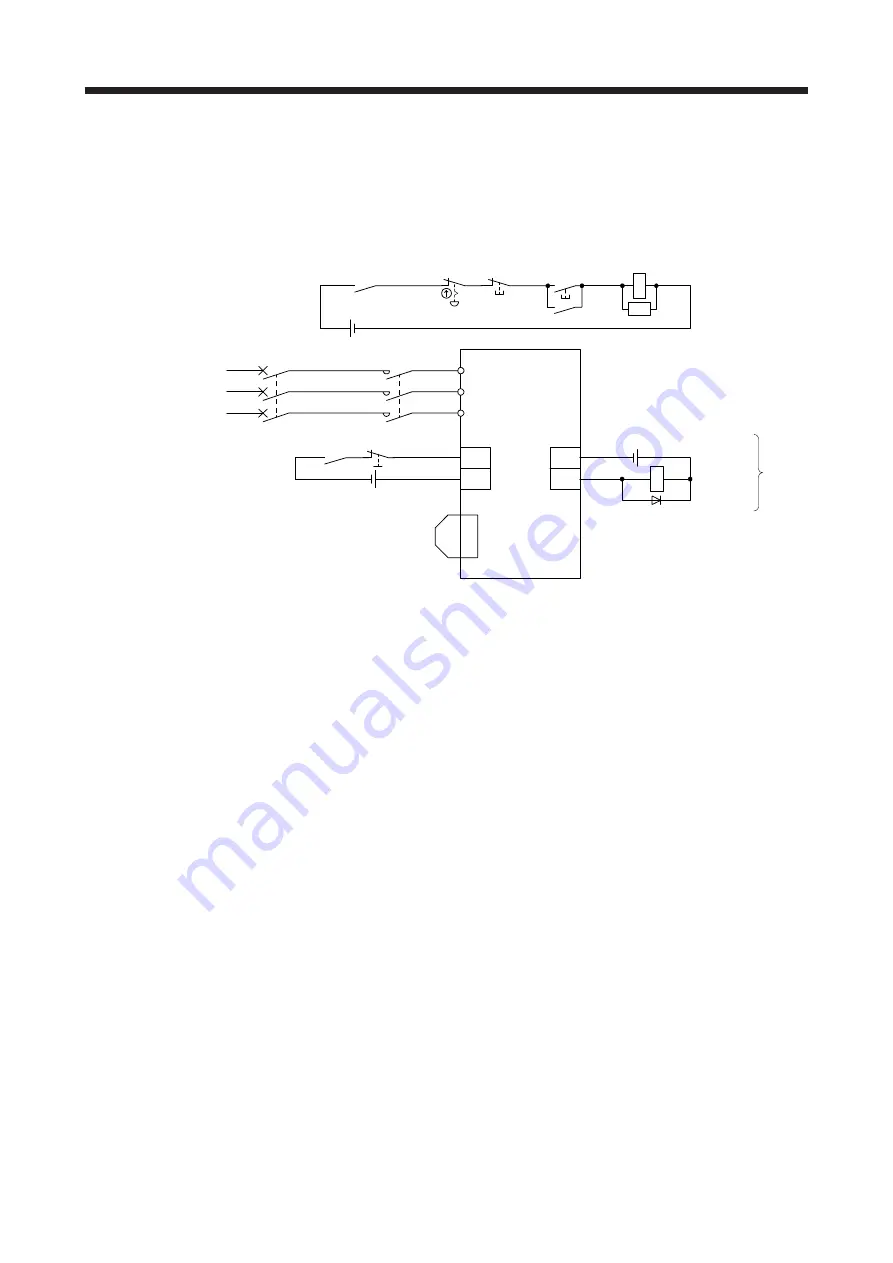
App. 12 Driving on/off of main circuit power supply with DC power supply
App. 12.1 Connection example
The power circuit is common to all capacity type of servo amplifiers. For the signal and wirings not given in
this section, refer to section 3.1.1 to 3.1.3.
MC (Note 3)
ALM
DOCOM
CN3
(Note 2)
24 V DC (Note 6)
24 V DC (Note 6)
24 V DC (Note 7,8)
Malfunction
(Note 9)
RA1
L1
L2
L3
Power supply
(Note 1)
Servo amplifier
Malfunction
RA1
OFF
MC
ON
MC
Emergency stop switch
CN3
(Note 2)
Forced stop 2
EM2
CN8
(Note 5)
Short-circuit connector
(Packed with the servo amplifier)
(Note 4)
Main circuit
power supply
MCCB
SK
DOCOM
Note 1. For the power supply specifications, refer to section 1.3.
2. This diagram shows sink I/O interface. For source I/O interface, refer to section 3.9.3.
3. Use a magnetic contactor with an operation delay time (interval between current being applied to the coil until closure of
contacts) of 80 ms or less. Depending on the main circuit voltage and operation pattern, bus voltage decreases, and that may
cause the forced stop deceleration to shift to the dynamic brake deceleration. When dynamic brake deceleration is not
required, slow the time to turn off the magnetic contactor.
4. Configure a circuit to turn off EM2 when the main circuit power is turned off to prevent an unexpected restart of the servo
amplifier.
5. When not using the STO function, attach the short-circuit connector came with a servo amplifier.
6. The illustration of the 24 V DC power supply is divided between input signal and output signal for convenience. However, they
can be configured by one.
7. Driving the on switch and off switch with the DC power supply meets IEC/EN 60204-1 requirements.
8. Do not use the 24 V DC interface power supply for the magnetic contactor DC power supply. Always use the power supply
designed exclusively for the magnetic contactor.
9. If disabling ALM (Malfunction) output with the parameter, configure the power supply circuit which switches off the magnetic
contactor after detection of alarm occurrence on the controller side.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































