





























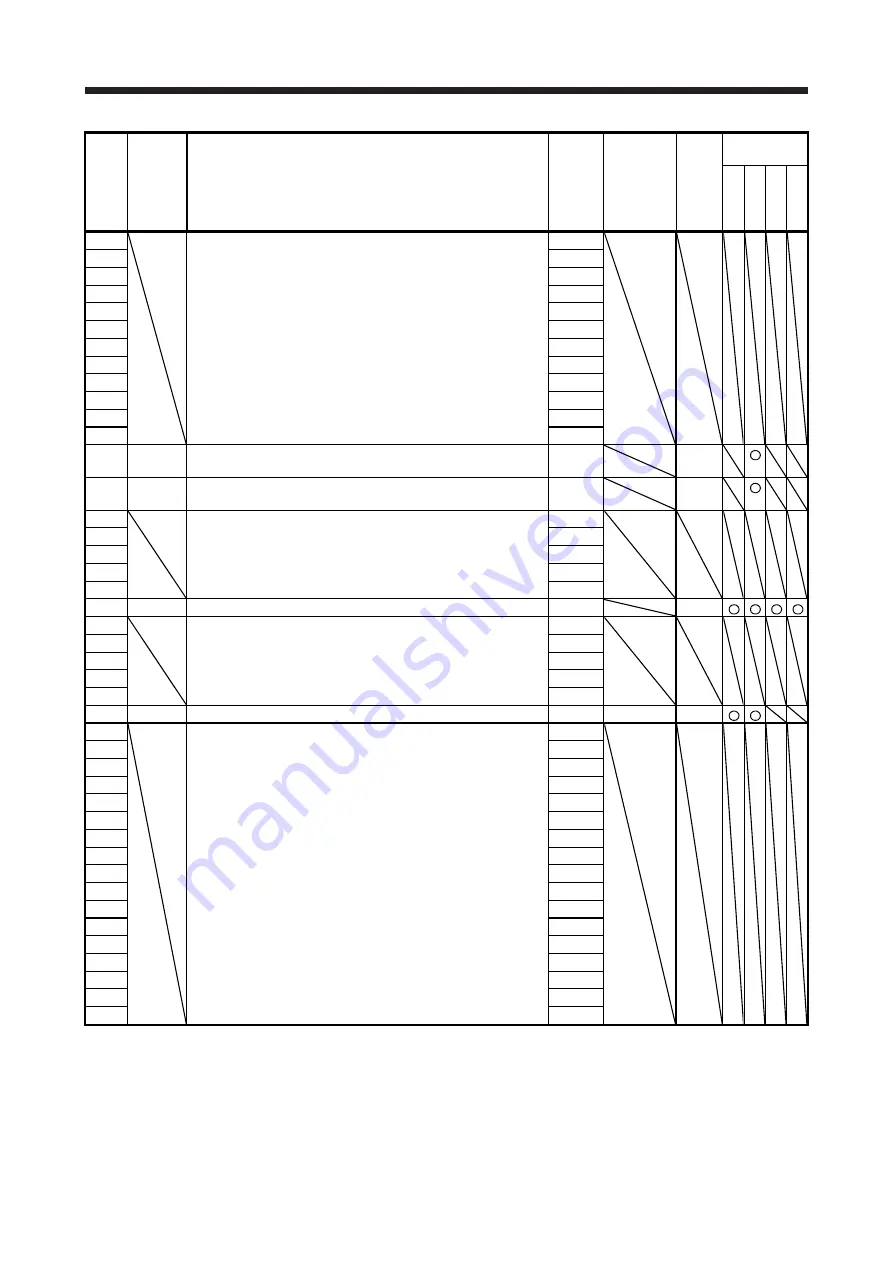
5. PARAMETERS
5 - 9
No. Symbol
Name
Initial
value
Unit
Each/
Common
Operation
mode
Standard
F
ull.
Lin.
D.D.
PE22 For manufacturer setting
0000h
PE23
0000h
PE24
0000h
PE25
0000h
PE26
0000h
PE27
0000h
PE28
0000h
PE29
0000h
PE30
0000h
PE31
0000h
PE32
0000h
PE33
0000h
PE34 **FBN2 Fully closed loop control - Feedback pulse electronic gear 2 -
Numerator
1
Each
PE35 **FBD2 Fully closed loop control - Feedback pulse electronic gear 2 -
Denominator
1
Each
PE36 For manufacturer setting
0.0
PE37
0.00
PE38
0.00
PE39
20
PE40
0000h
PE41
EOP3
Function selection E-3
0000h
Each
PE42 For manufacturer setting
0
PE43
0.0
PE44
0
PE45
0
PE46
0
PE47 TOF Torque
offset
0
[0.01%] Each
PE48 For manufacturer setting
0000h
PE49
0
PE50
0
PE51
0000h
PE52
0000h
PE53
0000h
PE54
0000h
PE55
0000h
PE56
0000h
PE57
0000h
PE58
0000h
PE59
0000h
PE60
0000h
PE61
0.00
PE62
0.00
PE63
0.00
PE64
0.00
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































