


























5. PARAMETERS
5 - 56
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
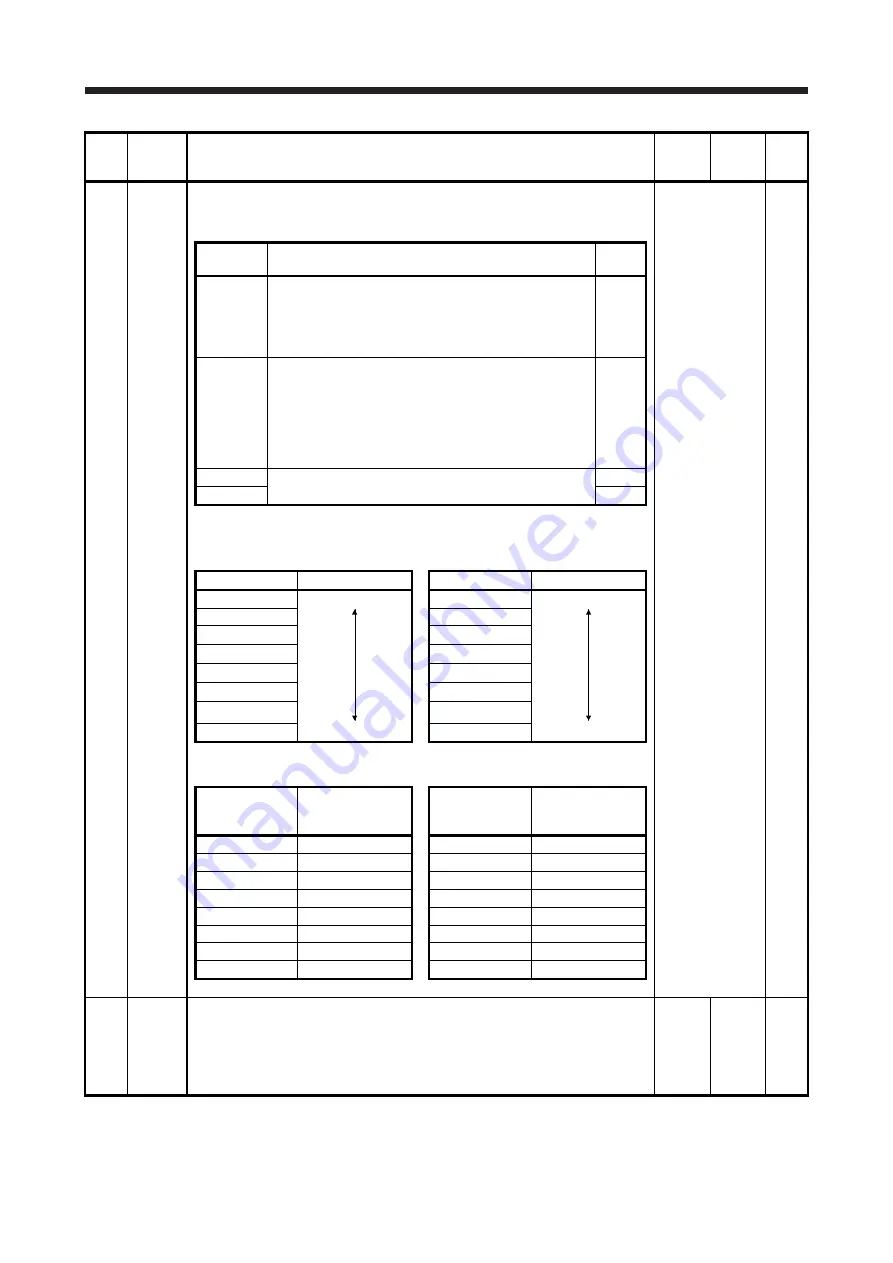
PL17
LTSTS Magnetic pole detection - Minute position detection method - Function selection
To enable the parameter, select "Minute position detection method (_ _ _ 4)" in [Pr.
PL08].
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
Response selection
Set a response of the minute position detection method.
When reducing a travel distance at the magnetic pole
detection, increase the setting value. Refer to table 5.9 for
settings.
0h
_ _ x _
Load to motor mass ratio/load to motor inertia ratio
selection
Select a load to mass of the linear servo motor primary-side
ratio or load to mass of the direct drive motor inertia ratio
used at the minute position detection method. Set a closest
value to the actual load.
Refer to table 5.10 for settings.
0h
_ x _ _
For manufacturer setting
0h
x _ _ _
0h
Table 5.9 Response of minute position detection method at
magnetic pole detection
Setting
value Response
Setting value
Response
_ _ _ 0
Low response
_ _ _ 8
Middle response
_ _ _ 1
_ _ _ 9
_ _ _ 2
_ _ _ A
_ _ _ 3
_ _ _ B
_ _ _ 4
_ _ _ C
_ _ _ 5
_ _ _ D
_ _ _ 6
_ _ _ E
_ _ _ 7
Middle response
_ _ _ F
High response
Table 5.10 Load to motor mass ratio/load to motor inertia ratio
Setting
value
Load to motor
mass ratio/load to
motor inertia ratio
Setting value
Load to motor
mass ratio/load to
motor inertia ratio
_ _ 0 _
10 times or less
_ _ 8 _
80 times
_ _ 1 _
10 times
_ _ 9 _
90 times
_ _ 2 _
20 times
_ _ A _
100 times
_ _ 3 _
30 times
_ _ B _
110 times
_ _ 4 _
40 times
_ _ C _
120 times
_ _ 5 _
50 times
_ _ D _
130 times
_ _ 6 _
60 times
_ _ E _
140 times
_ _ 7 _
70 times
_ _ F _
150 times or more
PL18
IDLV
Magnetic pole detection - Minute position detection method - Identification signal
amplitude
Set an identification signal amplitude used in the minute position detection method.
This parameter is enabled only when the magnetic pole detection is the minute
position detection method.
However, setting "0" will be 100% amplitude.
0
[%]
0 to
100
Each
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































