






















12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 1
12. ABSOLUTE POSITION DETECTION SYSTEM
CAUTION
If [AL. 25 Absolute position erased] or [AL. E3 Absolute position counter warning]
has occurred, always perform home position setting again. Otherwise, it may
cause an unexpected operation.
If [AL. 25], [AL. 92], or [AL. 9F] occurs due to such as short circuit of the battery,
the MR-BAT6V1 battery can become hot. Use the MR-BAT6V1 battery with case
to prevent getting burnt.
POINT
Refer to section 11.3 for the replacement procedure of the battery.
Disconnecting the encoder cable will erase the absolute position data. After
disconnecting the encoder cable, always execute home position setting and then
positioning operation.
12.1 Summary
12.1.1 Features
For normal operation, the encoder consists of a detector designed to detect a position within one revolution
and a cumulative revolution counter designed to detect the number of revolutions.
The absolute position detection system always detects the absolute position of the machine and keeps it
battery-backed, independently of whether the servo system controller power is on or off. Therefore, once
home position return is made at the time of machine installation, home position return is not needed when
power is switched on thereafter.
Even at a power failure or a malfunction, the system can be easily restored.
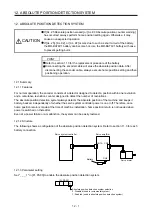
12.1.2 Structure
The following shows a configuration of the absolute position detection system. Refer to section 11.3 for each
battery connection.
Servo system controller
Servo amplifier
CN1A
Servo motor
CN2
Battery
CN4
12.1.3 Parameter setting
Set "_ _ _ 1" in [Pr. PA03] to enable the absolute position detection system.
Absolute position detection system selection
0: Disabled (used in incremental system)
1: Enabled (used in absolute position detection system)
[Pr. PA03]
1
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































