




























14. USING A LINEAR SERVO MOTOR
14 - 20
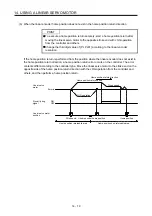
(2) Absolute position linear encoder
POINT
The data set type home position return can also be carried out.
When an absolute linear encoder is used, the reference home position is the position per 1048576
pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder home position
(absolute position data = 0).
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position. The linear encoder home position can be set in any position. LZ
(Encoder Z-phase pulse) cannot be used.
1048576 pulses × n
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
1048576 pulses
0 mm/s
(Note)
Note. Changeable with [Pr. PL01].
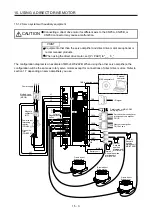
14.3.4 Test operation mode in MR Configurator2
CAUTION
The test operation mode is designed for checking servo operation. It is not for
checking machine operation. Do not use this mode with the machine. Always use
the linear servo motor alone.
If the servo motor operates abnormally, use EM2 (Forced stop 2) to stop it.
POINT
The content described in this section indicates the environment where the servo
amplifier and a personal computer are directly connected.
For the MR-J4 multi-axis servo amplifier, all axes go into the test operation
mode simultaneously, but only A-axis, B-axis, or C-axis can be operated.
When the test operation mode is selected with the test operation select switch
(SW2-1), the SSCNET III/H communication for the servo amplifier in the test
operation mode and the following servo amplifiers is blocked.
By using a personal computer and MR Configurator2, you can execute the positioning operation, the output
signal (DO) forced output, and the program operation without connecting the servo system controller.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































