
























17. APPLICATION OF FUNCTIONS
17 - 54
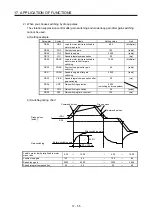
Parameter Symbol
Name
Setting
value
Unit
PX10
VRF23B Vibration suppression control 2 -
Vibration frequency damping after
gain switching
0.05
PX11
VRF24B Vibration suppression control 2 -
Resonance frequency damping
after gain switching
0.05
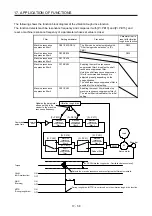
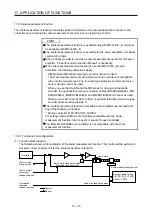
b) Switching timing chart
After-switching gain
63.4%
CDT = 100 ms
Before-switching gain
Gain switching
Control command
from controller
OFF
ON
OFF
Model loop gain
100
→
50
→
100
Load to motor inertia ratio/load to motor
mass ratio
4.00
→
10.00
→
4.00
Position loop gain
120
→
84
→
120
Speed loop gain
3000
→
4000
→
3000
Speed integral compensation
20
→
50
→
20
Vibration suppression control 1 - Vibration
frequency
50
→
60
→
50
Vibration suppression control 1 -
Resonance frequency
50
→
60
→
50
Vibration suppression control 1 - Vibration
frequency damping
0.20
→
0.15
→
0.20
Vibration suppression control 1 -
Resonance frequency damping
0.20
→
0.15
→
0.20
Vibration suppression control 2 - Vibration
frequency
20
→
30
→
20
Vibration suppression control 2 -
Resonance frequency
20
→
30
→
20
Vibration suppression control 2 - Vibration
frequency damping
0.10
→
0.05
→
0.10
Vibration suppression control 2 -
Resonance frequency damping
0.10
→
0.05
→
0.10
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































