
























18. MR-J4W2-0303B6 SERVO AMPLIFIER
18 - 25
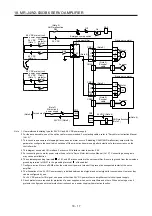
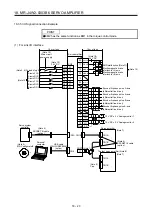
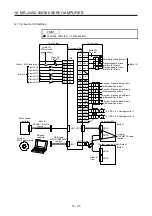
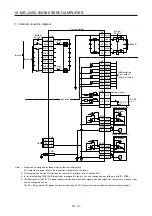
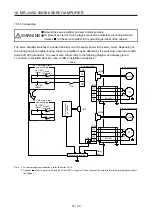
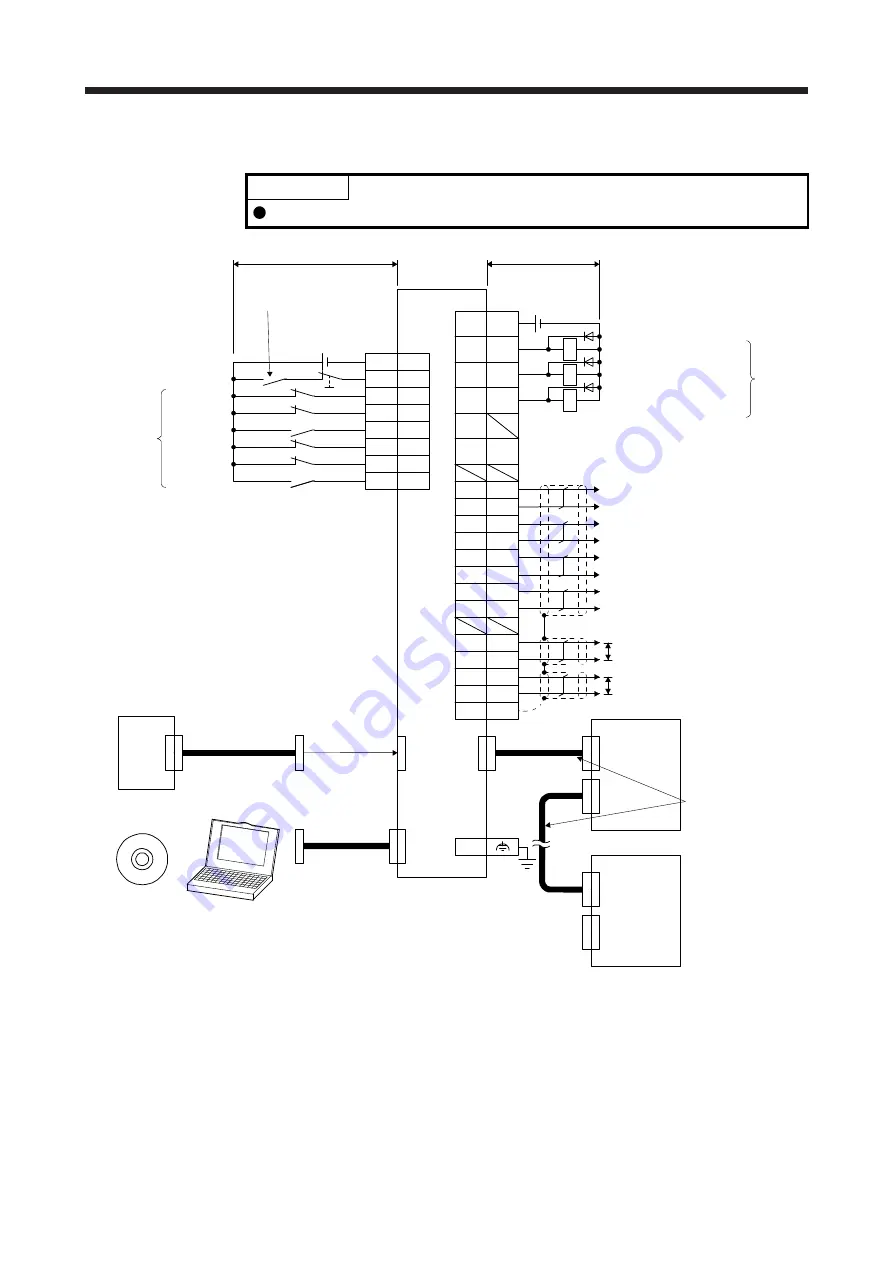
(2) For source I/O interface
POINT
For notes, refer to (1) in this section.
(Note 13)
DI3-B
23
10
CN3
AND malfunction (Note 11)
(Note 2)
11
CALM
12
25
MBR-B
13
3
LA-A
16
LAR-A
4
LB-A
17
LBR-A
5
LA-B
18
LAR-B
Servo amplifier
Electromagnetic brake
interlock for A-axis
CN3
Encoder A-phase pulse A-axis
Encoder B-phase pulse A-axis
Encoder A-phase pulse B-axis
(differential line driver)
(differential line driver)
(differential line driver)
(Note 3, 4) Forced stop 2
A-axis FLS
A-axis RLS
A-axis DOG
B-axis FLS
B-axis RLS
B-axis DOG
(Note 14)
DICOM
EM2
7
DI1-A
8
DI2-A
9
DI3-A
(Note 6)
SSCNET III cable
(option)
Servo system
controller
CN1A
CN1B
(Note 7)
(Note 1)
(Note 9)
Cap
(Note 5)
MR Configurator2
+
Personal
computer
CN5
USB cable
MR-J3USBCBL3M
(option)
20
DI1-B
21
DI2-B
22
MBR-A
RA1
RA2
RA3
(Note 10)
24 V DC
10 m or less
10 m or less
Electromagnetic brake
interlock for B-axis
(Note 15)
Main circuit
power supply
CN1A
CN1B
Servo amplifier
The last servo amplifier (Note 8)
CN1B
CN1A
24
(Note 12)
(Note 7)
26
DOCOM
(Note 10)
24 V DC
19
Plate
LBR-B
2
MO1
1
LG
MO2
6
LB-B
Encoder B-phase pulse B-axis
10 V DC ± 5 V Analog monitor 1
10 V DC ± 5 V Analog monitor 2
LG
SD
15
14
(differential line driver)
CNP1
11
(Note 6)
SSCNET III cable
(option)
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































