





























APPENDIX
App. - 48
App. 12 Special specification
App. 12.1 Amplifier without dynamic brake
App. 12.1.1 Summary
This section explains servo amplifiers without dynamic brakes Items not given in this section will be the
same as MR-J4W_-_B_.
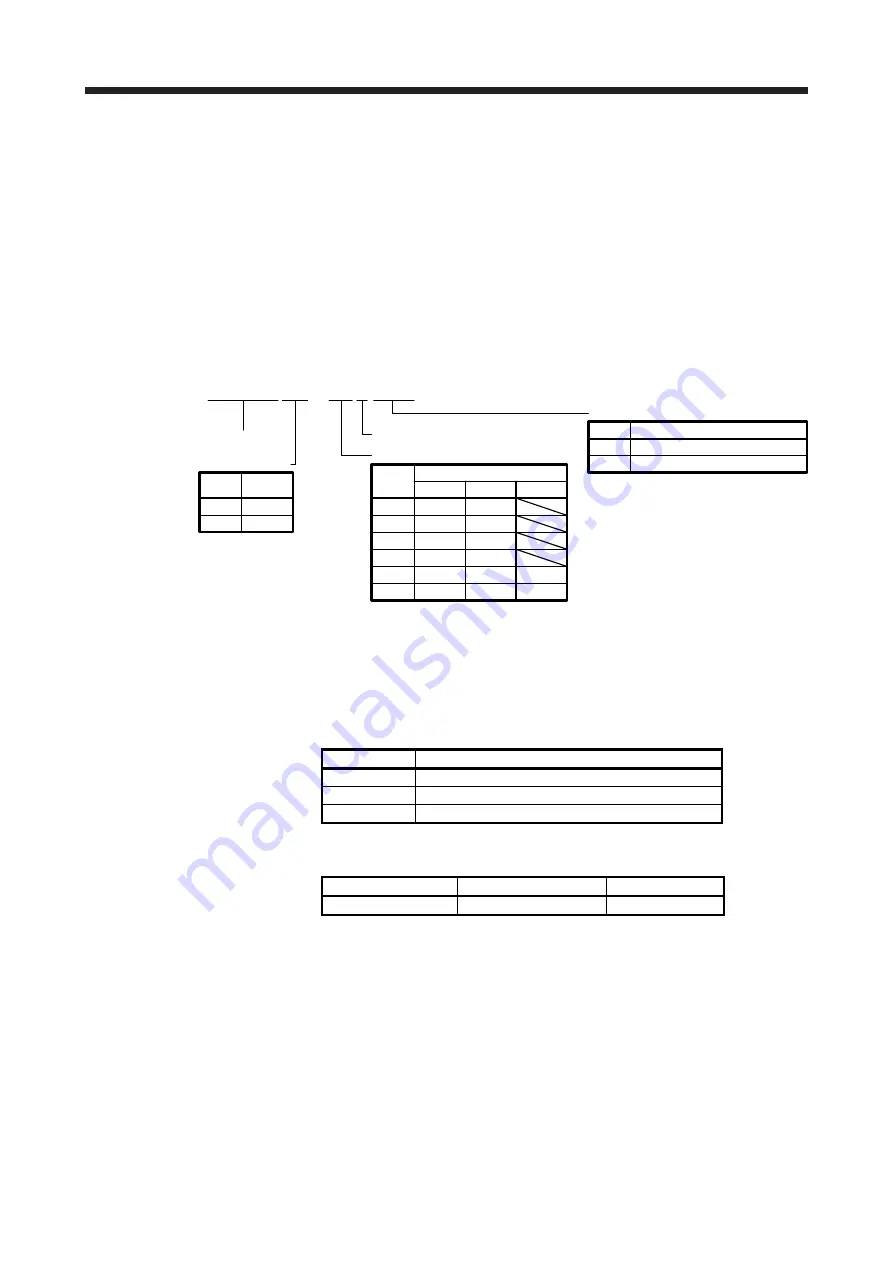
App. 12.1.2 Model
The following describes what each block of a model name indicates. Not all combinations of the symbols are
available.
Symbol
SSCNETIII/H interface
Rated output
Number of axes
Symbol
Rated output [kW]
44
22
77
A-axis
B-axis
C-axis
0.2
0.4
0.75
1
0.2
0.4
0.2
0.4
0.75
1
0.2
0.4
0.2
0.4
222
444
1010
Series
W2
W3
Number
of axes
2
3
Special specifications
Symbol
Special specifications
-ED
None
Standard
Without a dynamic brake
M R
J
D
B
W
E
2 2
2
4
-
-
-
App. 12.1.3 Specifications
The dynamic brake built-in the servo amplifier is removed.
Take safety measures such as making another circuit in case of an emergency stop, alarm, and servo motor
stop at power supply shut-off.
When the following servo motors are used, the electronic dynamic brake can start at an alarm occurrence.
Series Servo
motor
HG-KR HG-KR053/HG-KR13/HG-KR23/HG-KR43
HG-MR HG-MR053/HG-MR13/HG-MR23/HG-MR43
HG-SR HG-SR51/HG-SR52
Setting the following parameter disables the electronic dynamic brake.
Servo amplifier
Parameter
Setting value
MR-J4W_-_B-ED
[Pr. PF06]
_ _ _ 2
When "2 _ _ _" (initial value) is set in [Pr. PA04], an forced stop deceleration can start at an alarm
occurrence. Setting "0 _ _ _" in [Pr. PA04] disables the forced stop deceleration.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































