



























3. SIGNALS AND WIRING
3 - 22
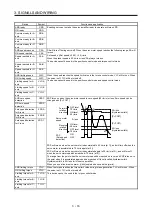
3.6.3 Vertical axis freefall prevention function
The vertical axis freefall prevention function avoids machine damage by pulling up the shaft slightly like the
following case.
When the servo motor is used for operating vertical axis, the servo motor electromagnetic brake and the
base circuit shut-off delay time function avoid dropping axis at forced stop. However, the functions may not
avoid dropping axis a few
μ
m due to the backlash of the servo motor electromagnetic brake.
The vertical axis freefall prevention function is enabled with the following conditions.
Other than "0" is set to [Pr. PC31 Vertical axis freefall prevention compensation amount].
EM2 (Forced stop 2) turned off, an alarm occurred, or SSCNETIII/H communication shut-off occurred
while the servo motor speed is zero speed or less.
The base circuit shut-off delay time function is enabled.
(1) Timing chart
MBR
(Electromagnetic
brake interlock)
ON
OFF (Enabled)
Base circuit
(Energy supply to
the servo motor)
ON
OFF
Actual operation of
electromagnetic brake
Disabled
Enabled
Position
Travel
distance
ON
OFF (Enabled)
EM2 (Forced stop 2)
Set the base circuit shut-off delay time. ([Pr. PC02])
(2) Adjustment
Set the freefall prevention compensation amount in [Pr. PC31].
While the servo motor is stopped, turn off the EM2 (Forced stop 2). Adjust the base circuit shut-off
delay time in [Pr. PC02] in accordance with the travel distance ([Pr. PC31). Adjust it considering the
freefall prevention compensation amount by checking the servo motor speed, torque ripple, etc.
3.6.4 Residual risks of the forced stop function (EM2)
(1) The forced stop function is not available for alarms that activate the dynamic brake when the alarms
occur.
(2) When an alarm that activates the dynamic brake during forced stop deceleration occurs, the braking
distance until the servo motor stops will be longer than that of normal forced stop deceleration without
the dynamic brake.
(3) If STO is turned off during forced stop deceleration, [AL. 63 STO timing error] will occur.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































