





























4. STARTUP
4 - 16
(b) Positioning operation
Positioning operation can be performed without using the servo system controller. Use this operation
with the forced stop reset. This operation may be used independently of whether the servo is on or
off and whether the servo system controller is connected or not.
Exercise control on the positioning operation screen of MR Configurator2.
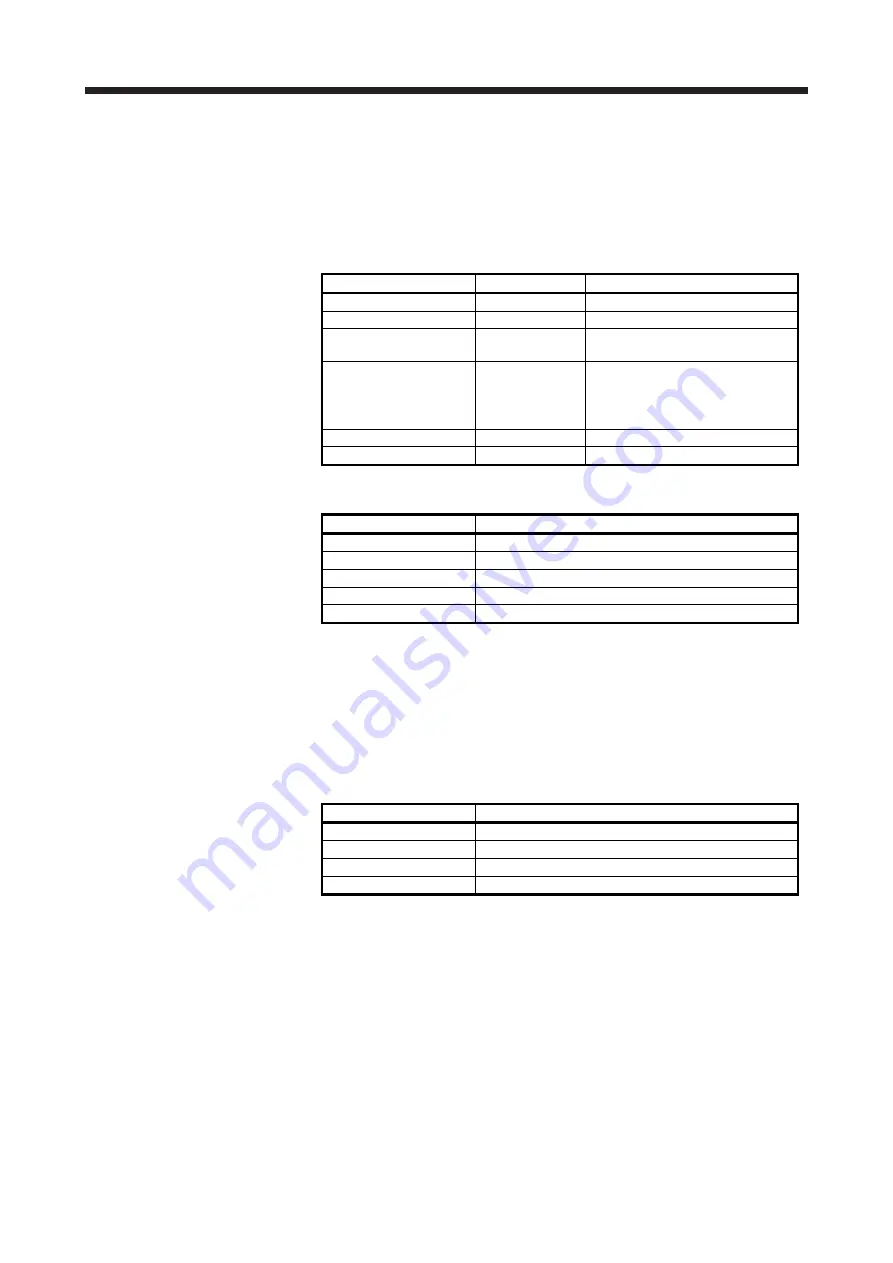
1) Operation pattern
Item
Default value
Setting range
Travel distance [pulse]
4000
0 to 99999999
Speed [r/min]
200
0 to max. speed
Acceleration/deceleration
time constant [ms]
1000
0 to 50000
Repeat pattern
Fwd. rot. (CCW) to
rev. rot. (CW)
Fwd. rot. (CCW) to rev. rot. (CW)
Fwd. rot. (CCW) to fwd. rot. (CCW)
Rev. rot. (CW) to fwd. rot. (CCW)
Rev. rot. (CW) to rev. rot. (CW)
Dwell time [s]
2.0
0.1 to 50.0
Number of repeats [time]
1
1 to 9999
2) Operation method
Operation Screen
control
Forward rotation start
Click "Forward".
Reverse rotation start
Click "Reverse".
Pause Click
"Pause".
Stop Click
"Stop".
Forced stop
Click "Forced stop".
(c) Program operation
Positioning operation can be performed in two or more operation patterns combined, without using
the servo system controller. Use this operation with the forced stop reset. This operation may be
used independently of whether the servo is on or off and whether the servo system controller is
connected or not.
Exercise control on the program operation screen of MR Configurator2. For details, refer to Help of
MR Configurator2.
Operation Screen
control
Start Click
"Start".
Pause Click
"Pause".
Stop Click
"Stop".
Forced stop
Click "Forced stop".
(d) Output signal (DO) forced output
Output signals can be switched on/off forcibly independently of the servo status. Use this function for
output signal wiring check, etc. Exercise control on the DO forced output screen of MR
Configurator2.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...





































































