





























5. PARAMETERS
5 - 7
No. Symbol
Name
Initial
value
Unit
Each/
Common
Operation
mode
Standard
F
ull.
Lin.
D.D.
PC56 For manufacturer setting
0000h
PC57
0000h
PC58
0000h
PC59
0000h
PC60
0000h
PC61
0000h
PC62
0000h
PC63
0000h
PC64
0000h
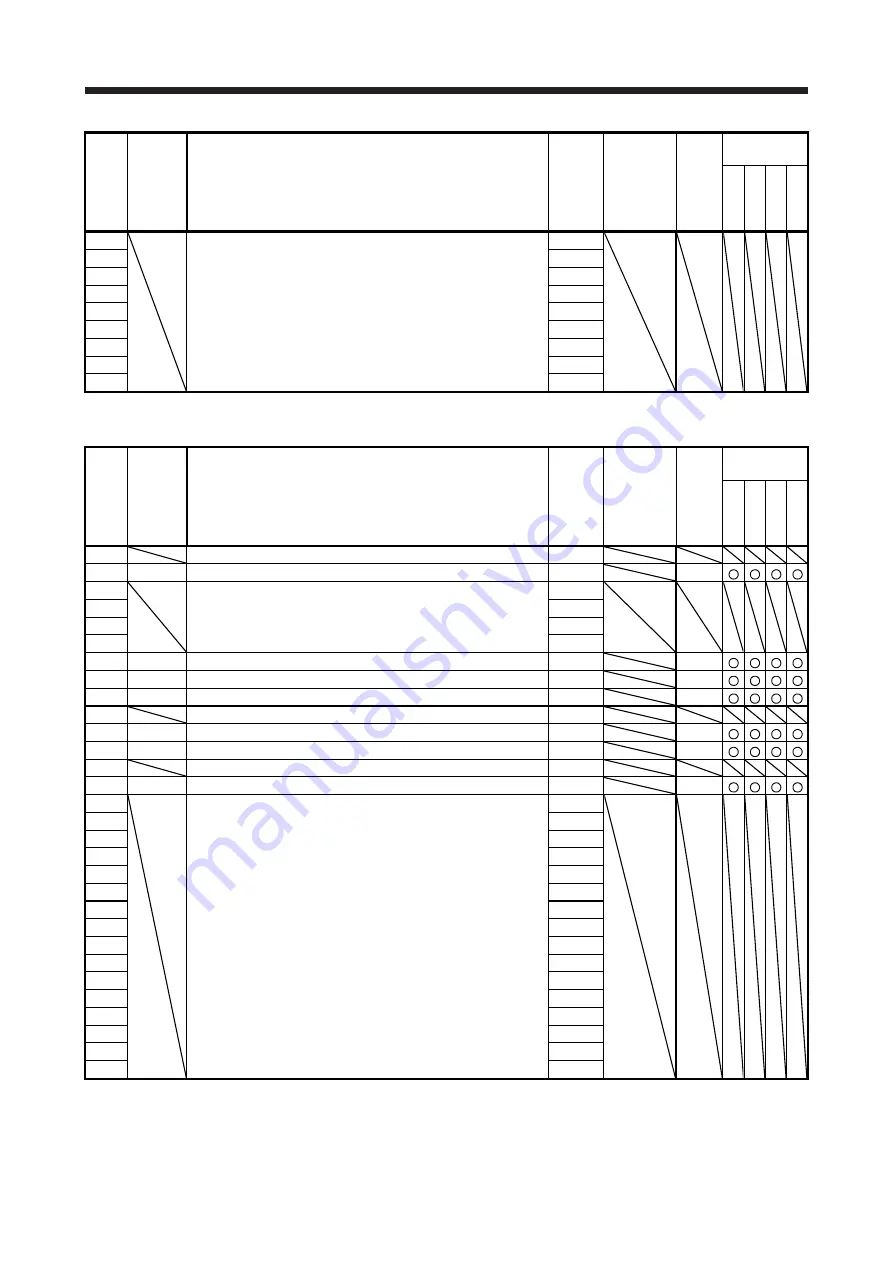
5.1.4 I/O setting parameters ([Pr. PD_ _ ])
No. Symbol
Name
Initial
value
Unit
Each/
Common
Operation
mode
Standard
F
ull.
Lin.
D.D.
PD01
For manufacturer setting
0000h
PD02
*DIA2
Input signal automatic on selection 2
0000h
Each
PD03 For manufacturer setting
0020h
PD04
0021h
PD05
0022h
PD06
0000h
PD07
*DO1
Output device selection 1
0005h
Each
PD08
*DO2
Output device selection 2
0004h
Common
PD09
*DO3
Output device selection 3
0003h
Common
PD10
For manufacturer setting
0000h
PD11
*DIF
Input filter setting (Note)
0004h
Common
PD12
*DOP1 Function selection D-1
0000h
Each
PD13
For manufacturer setting
0000h
PD14
*DOP3 Function selection D-3
0000h
Each
PD15 For manufacturer setting
0000h
PD16
0000h
PD17
0000h
PD18
0000h
PD19
0000h
PD20
0
PD21
0
PD22
0
PD23
0
PD24
0000h
PD25
0000h
PD26
0000h
PD27
0000h
PD28
0000h
PD29
0000h
PD30
0
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































