





























5. PARAMETERS
5 - 22
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
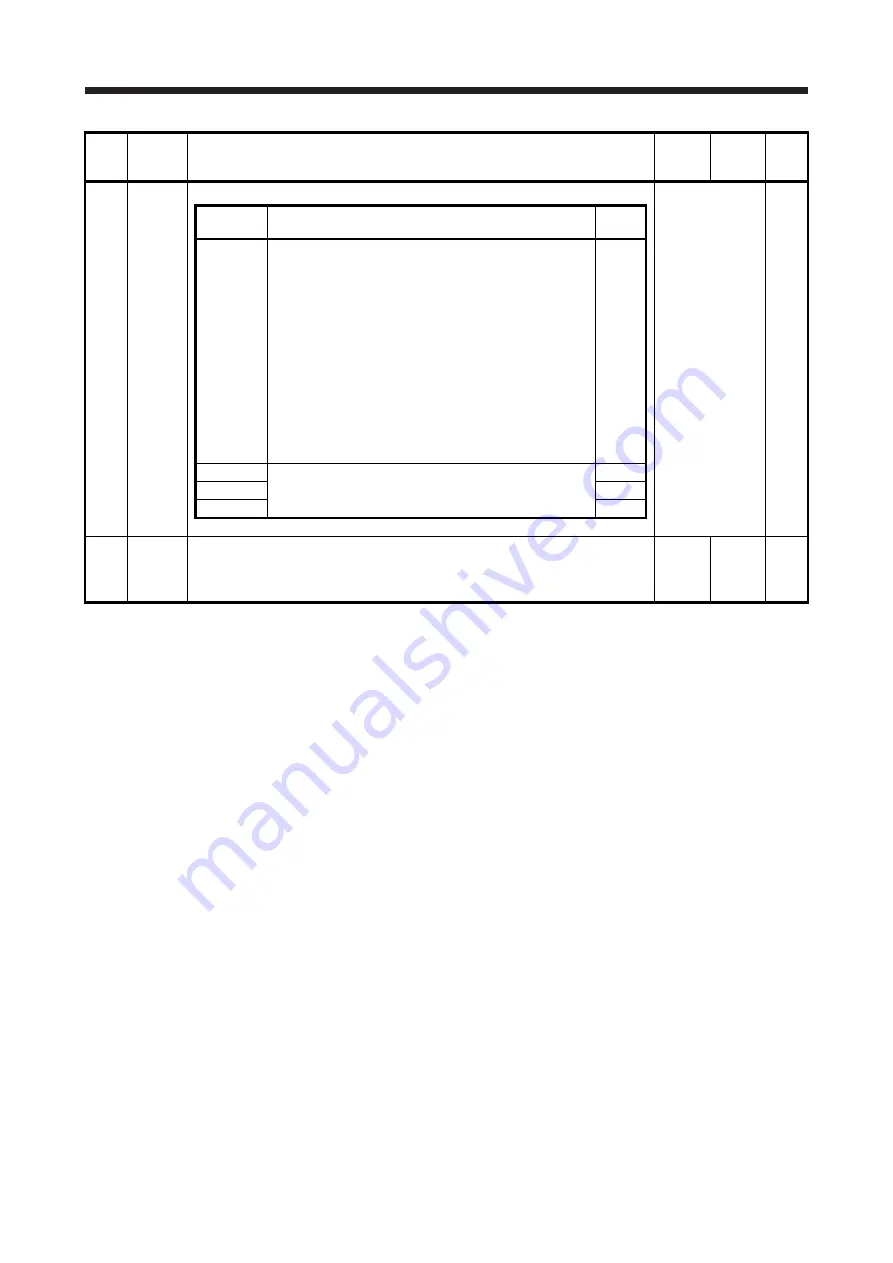
PA24
AOP4
Function selection A-4
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
Vibration suppression mode selection
0: Standard mode
1: 3 inertia mode
2: Low response mode
When two low resonance frequencies are generated, select
"3 inertia mode (_ _ _ 1)". When the load to motor inertia
ratio exceeds the recommended load to motor inertia ratio
select "Low response mode (_ _ _ 2)".
When you select the standard mode or low response mode,
"Vibration suppression control 2" is not available.
When you select the 3 inertia mode, the feed forward gain
is not available.
Before changing the control mode with the controller during
the 3 inertia mode or low response mode, stop the motor.
0h
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PA25 OTHOV One-touch tuning - Overshoot permissible level
Set a permissible value of overshoot amount for one-touch tuning as a percentage of
the in-position range.
However, setting "0" will be 50%.
0
[%]
0
to
100
Each
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































