




























5. PARAMETERS
5 - 49
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
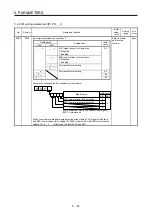
PE47 TOF Torque
offset
Set this when canceling unbalanced torque of vertical axis. Set this assuming the
rated torque of the servo motor as 100%. The torque offset does not need to be set for
a machine not generating unbalanced torque. The torque offset cannot be used for
linear servo motors and direct drive motors. Set "0".
The torque offset set with this parameter will be enabled in the position control mode,
speed control mode, and torque control mode. Input commands assuming torque
offset for the torque control mode.
This parameter is supported with software version B4 or later.
0
[0.01%]
-10000
to
10000
Each
5.2.6 Extension setting 3 parameters ([Pr. PF_ _ ])
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
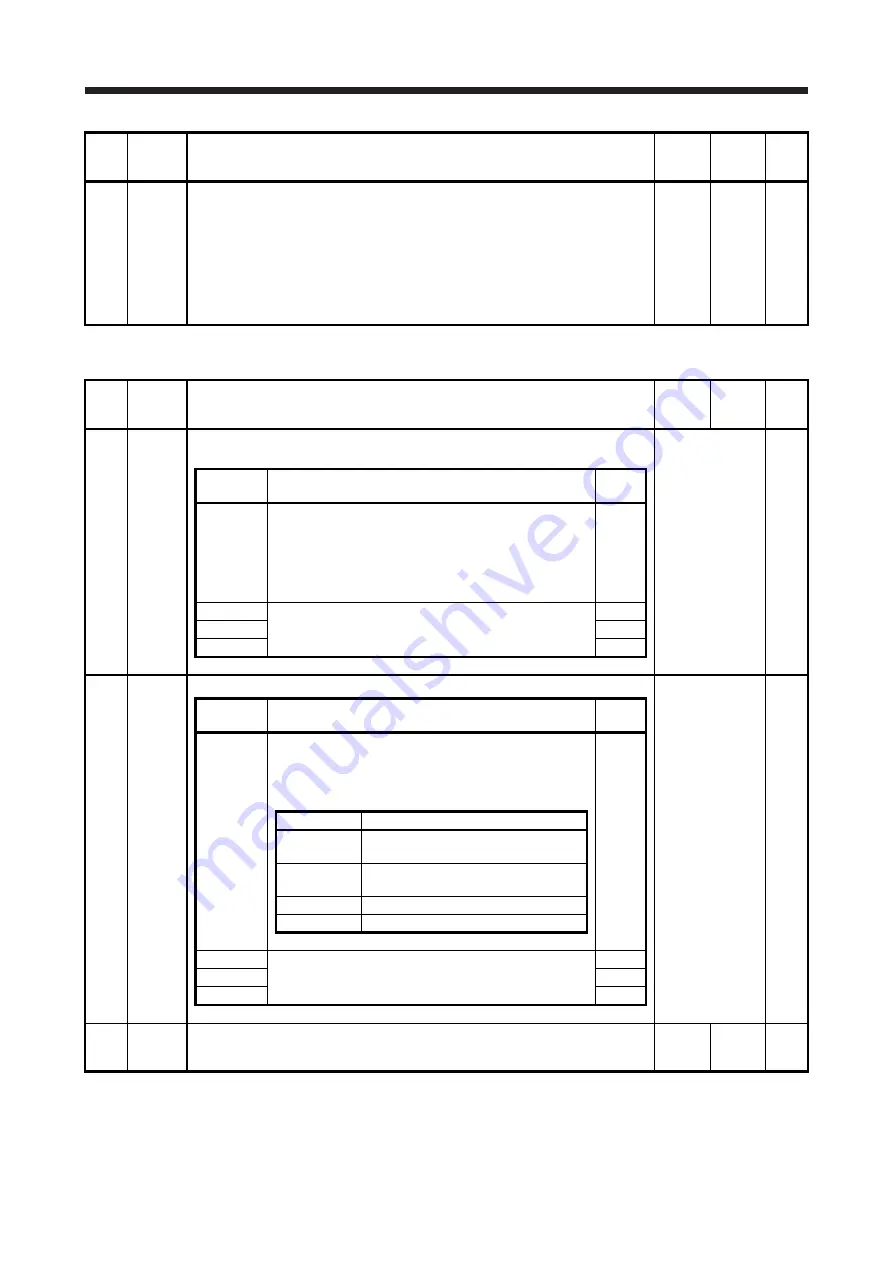
PF02
*FOP2 Function selection F-2
Set targets of [AL. EB The other axis error warning].
Refer to Name
and function
column.
Common
Setting
digit
Explanation
Initial
value
_ _ _ x
Target alarm selection of the other axis error warning
Select target alarms of the other axis error warning.
0: [AL. 24 Main circuit error] and [AL. 32 Overcurrent]
1: All alarms
For alarms occurring at all axes, [AL. EB The other axis
error warning] will not occur regardless of alarm No.
0h
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PF06
*FOP5 Function selection F-5
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
Electronic dynamic brake selection
0: Automatic (enabled only for specified servo motors)
2: Disabled
Refer to the following table for the specified servo motors.
0h
Series
Servo
motor
HG-KR
HG-KR053/HG-KR13/HG-KR23/HG-
KR43
HG-MR
HG-MR053/HG-MR13/HG-MR23/HG-
MR43
HG-SR
HG-SR51/HG-SR52
HG-AK
HG-AK0136/HG-AK0236/HG-AK0336
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PF12 DBT Electronic
dynamic brake operating time
Set an operating time for the electronic dynamic brake.
2000
[ms]
0
to
10000
Each
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































