





























6. NORMAL GAIN ADJUSTMENT
6 - 17
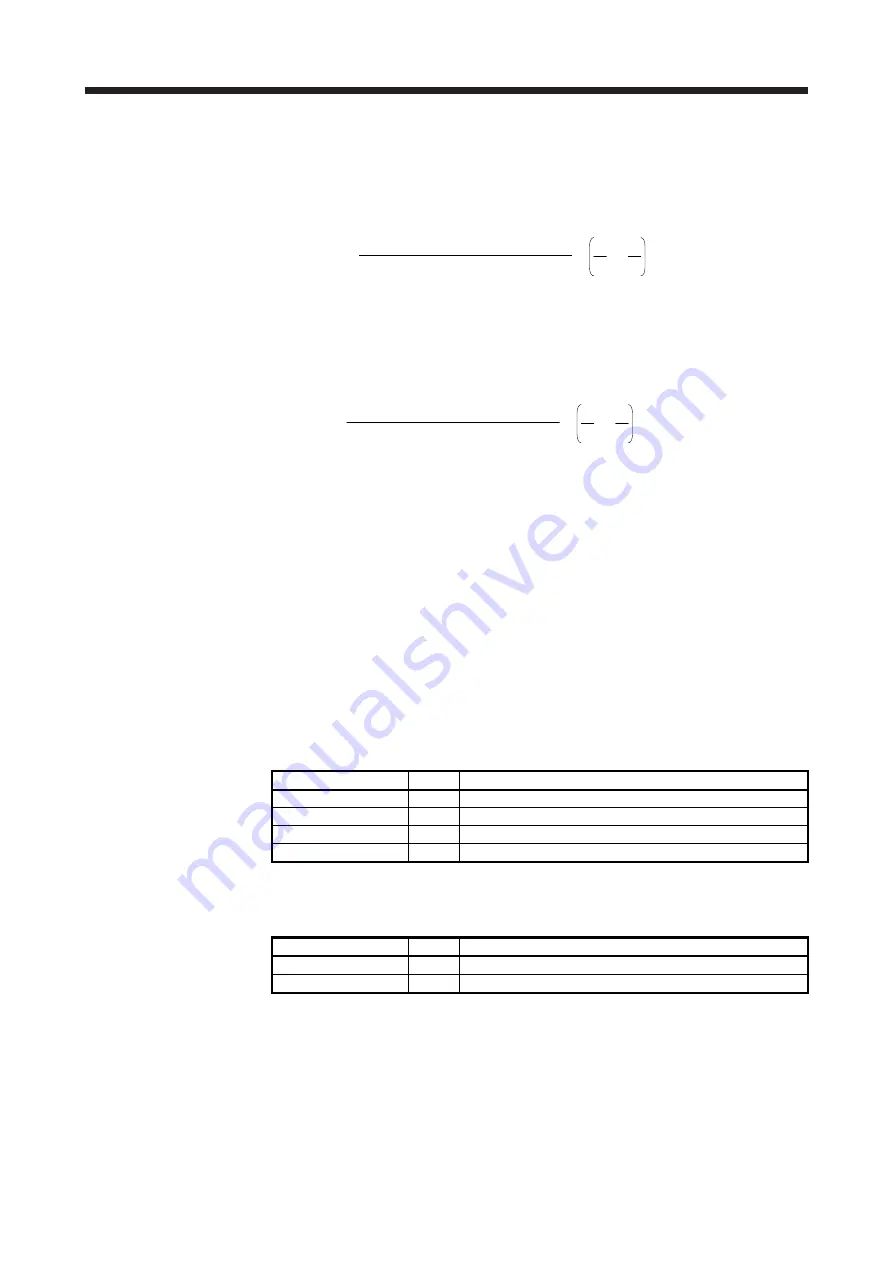
3) [Pr. PB08 Position loop gain]
This parameter determines the response level to a disturbance to the position control loop.
Increasing the value increases the response level to the disturbance, but a too high value will
increase vibration of the mechanical system.
Position loop gain guideline
≤
(1 + Load to motor inertia ratio)
Speed loop gain
×
8
1
4
1 to
4) [Pr. PB07 Model loop gain]
This parameter determines the response level to a position command. Increasing the value
improves track ability to a position command, but a too high value will make overshoot liable to
occur at settling.
Model loop gain guideline
≤
(1 + Load to motor inertia ratio)
Speed loop gain
×
8
1
4
1 to
6.5 2 gain adjustment mode
The 2 gain adjustment mode is used to match the position loop gains of the axes when performing the
interpolation operation of servo motors of two or more axes for an X-Y table or the like. In this mode,
manually set the model loop gain that determines command track ability. Other parameters for gain
adjustment are set automatically.
(1) 2 gain adjustment mode 1 (interpolation mode)
The 2 gain adjustment mode 1 manually set the model loop gain that determines command track ability.
The mode constantly estimates the load to motor inertia ratio, and automatically set other parameters for
gain adjustment to optimum gains using auto tuning response.
The following parameters are used for 2 gain adjustment mode 1.
(a) Automatically adjusted parameter
The following parameters are automatically adjusted by auto tuning.
Parameter Symbol
Name
PB06
GD2
Load to motor inertia ratio/load to motor mass ratio
PB08
PG2
Position loop gain
PB09
VG2
Speed loop gain
PB10
VIC
Speed integral compensation
(b) Manually adjusted parameter
The following parameters are adjustable manually.
Parameter Symbol
Name
PA09
RSP
Auto tuning response
PB07
PG1
Model loop gain
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































