





























14. USING A LINEAR SERVO MOTOR
14 - 18
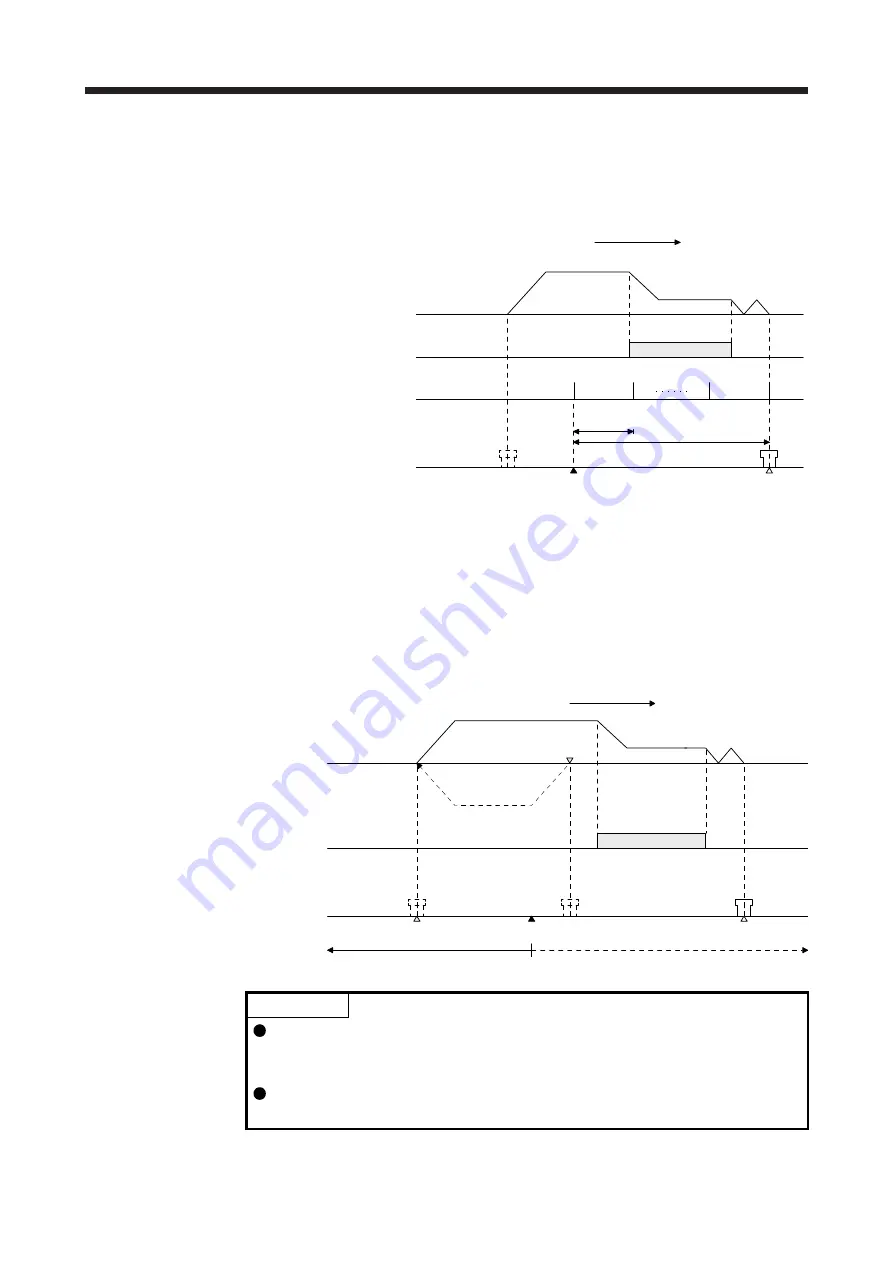
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always be
passed through after a home position return start. LZ (Encoder Z-phase pulse) cannot be used.
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
0 mm/s
(Note)
1048576 pulses
1048576 pulses × n
Note. Changeable with [Pr. PL01].
(b) When the linear encoder home position does not exist in the home position return direction
If the home position return is performed from the position where the linear encoder does not exist in
the home position return direction, a home position return error occurs on the controller. The error
contents differ according to the controller type. Move the linear servo motor to the stroke end on the
opposite side of the home position return direction with the JOG operation from the controller and
others, and then perform a home position return.
Stroke end
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
JOG operation
Home position returnable area
Home position non-returnable area
0 mm/s
Linear encoder home position
Linear servo
motor
Proximity dog
signal
Linear servo motor
position
POINT
To execute a home position return securely, start a home position return after
moving the linear servo motor to the opposite stroke end with JOG operation
from the controller and others.
Change the third digit value of [Pr. PL01] according to the linear encoder
resolution.
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































