





























17. APPLICATION OF FUNCTIONS
17 - 58
(a) Parameter setting method
Selection of the encoder pulse count polarity
This parameter is used to set the load-side encoder polarity to be connected to CN2L connector in
order to match the CCW direction of servo motor and the increasing direction of load-side encoder
feedback. Set this as necessary.
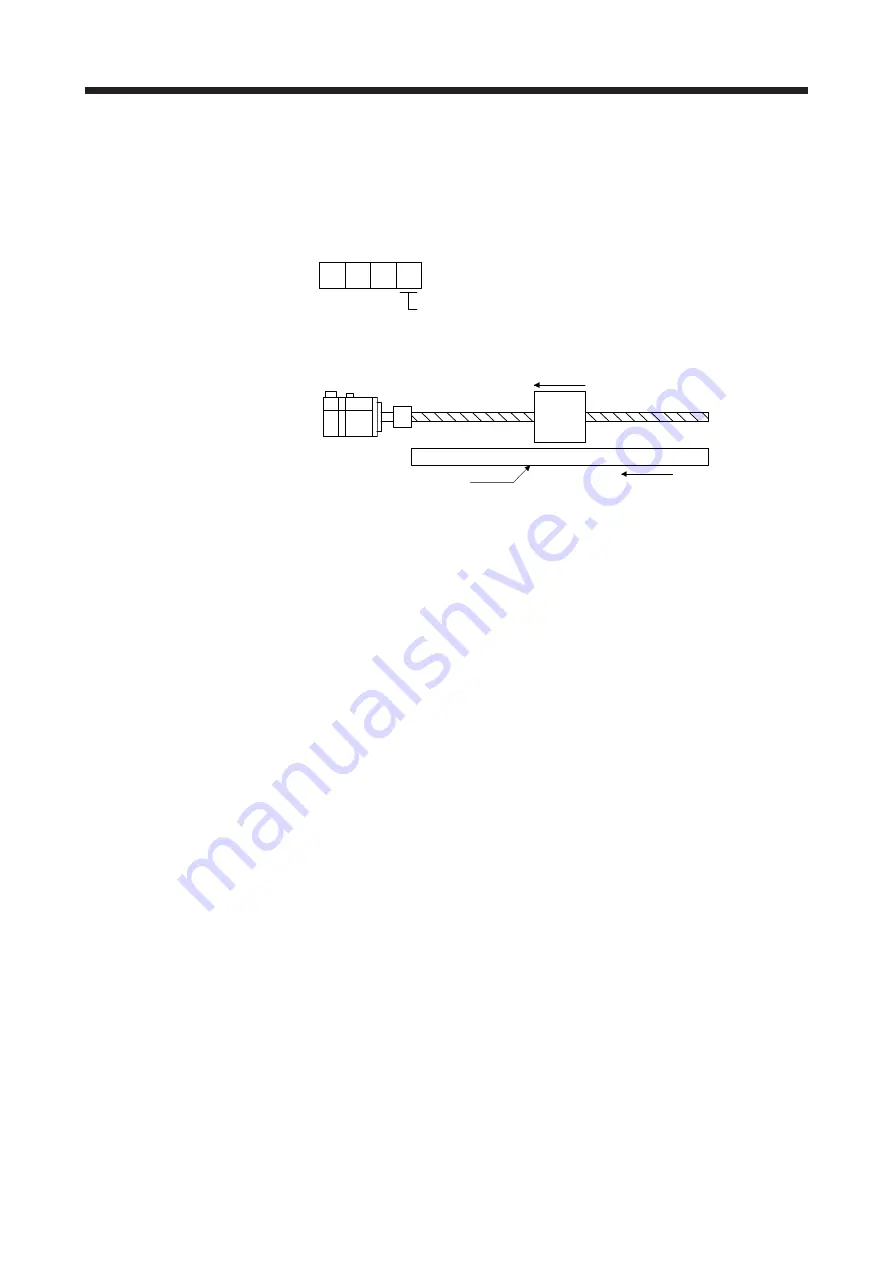
0 0 0
[Pr. PC27]
Load-side encoder pulse count polarity selection
0: Load-side encoder pulse increasing direction in the servo motor CCW
1: Load-side encoder pulse decreasing direction in the servo motor CCW
Servo motor
Linear encoder
Servo motor CCW direction
Address increasing direction of linear encoder
(b) How to confirm the scale measurement encoder feedback direction
You can confirm the directions of the cumulative feedback pulses of servo motor encoder and the
load-side cumulative feedback pulses are matched by moving the device (scale measurement
encoder) manually in the servo-off status. If mismatched, reverse the polarity.
(3) Confirmation of scale measurement encoder position data
Check the scale measurement encoder mounting and parameter settings for any problems.
Operate the device (scale measurement encoder) to check the data of the scale measurement encoder
is renewed correctly. If the data is not renewed correctly, check the wiring and parameter settings.
Change the scale polarity as necessary.
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......






































































