



























18. MR-J4W2-0303B6 SERVO AMPLIFIER
18 - 46
18.7 Characteristics
The items in the following table are the same as those for MR-J4W2-_B and MR-J4W3-_B servo amplifiers.
Refer to the section of the detailed explanation field for details.
Item Detailed
explanation
Cable bending life
Section 10.4
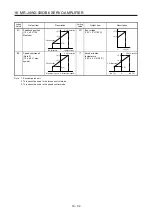
18.7.1 Overload protection characteristics
An electronic thermal is built in the servo amplifier to protect the servo motor, servo amplifier and servo
motor power wires from overloads.
[AL. 50 Overload 1] occurs if overload operation performed is above the electronic thermal protection curve
shown in fig. 18.1. [AL. 51 Overload 2] occurs if the maximum current is applied continuously for several
seconds due to machine collision, etc. Use the equipment on the left-side area of the continuous or broken
line in the graph.
For the system where the unbalanced torque occurs, such as a vertical axis system, the unbalanced torque
of the machine should be kept at 70% or less of the rated torque.
This servo amplifier has a servo motor overload protection for each axis. (The servo motor overload current
(full load current) is set on the basis of 120% rated current of the servo amplifier.)
Operation time [s]
0.1
1
10
100
1000
0
50
100
150
200
250
300
350
400
Servo-lock
Operation
(Note) Load ratio [%]
HG-AK0136/HG-AK0236/HG-AK0336
Note. If operation that generates torque more than 100% of the rating is performed with an
abnormally high frequency in a servo motor stop status (servo-lock status) or in a 30
r/min or less low-speed operation status, the servo amplifier may malfunction
regardless of the electronic thermal protection.
Fig. 18.1 Electronic thermal protection characteristics
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































