





























4. STARTUP
4 - 18
(1) Motor-less operation
Without connecting a servo motor to servo amplifier, output signals or status displays can be provided in
response to the servo system controller commands as if the servo motor is actually running. This
operation may be used to check the servo system controller sequence. Use this operation with the
forced stop reset. Use this operation with the servo amplifier connected to the servo system controller.
To stop the motor-less operation, set the motor-less operation selection to "Disable" in the servo
parameter setting of the servo system controller. When the power supply is turned on next time, motor-
less operation will be disabled.
(a) Load conditions
Load item
Condition
Load torque
0
Load to motor inertia ratio
Same as the moment of inertia of the servo motor
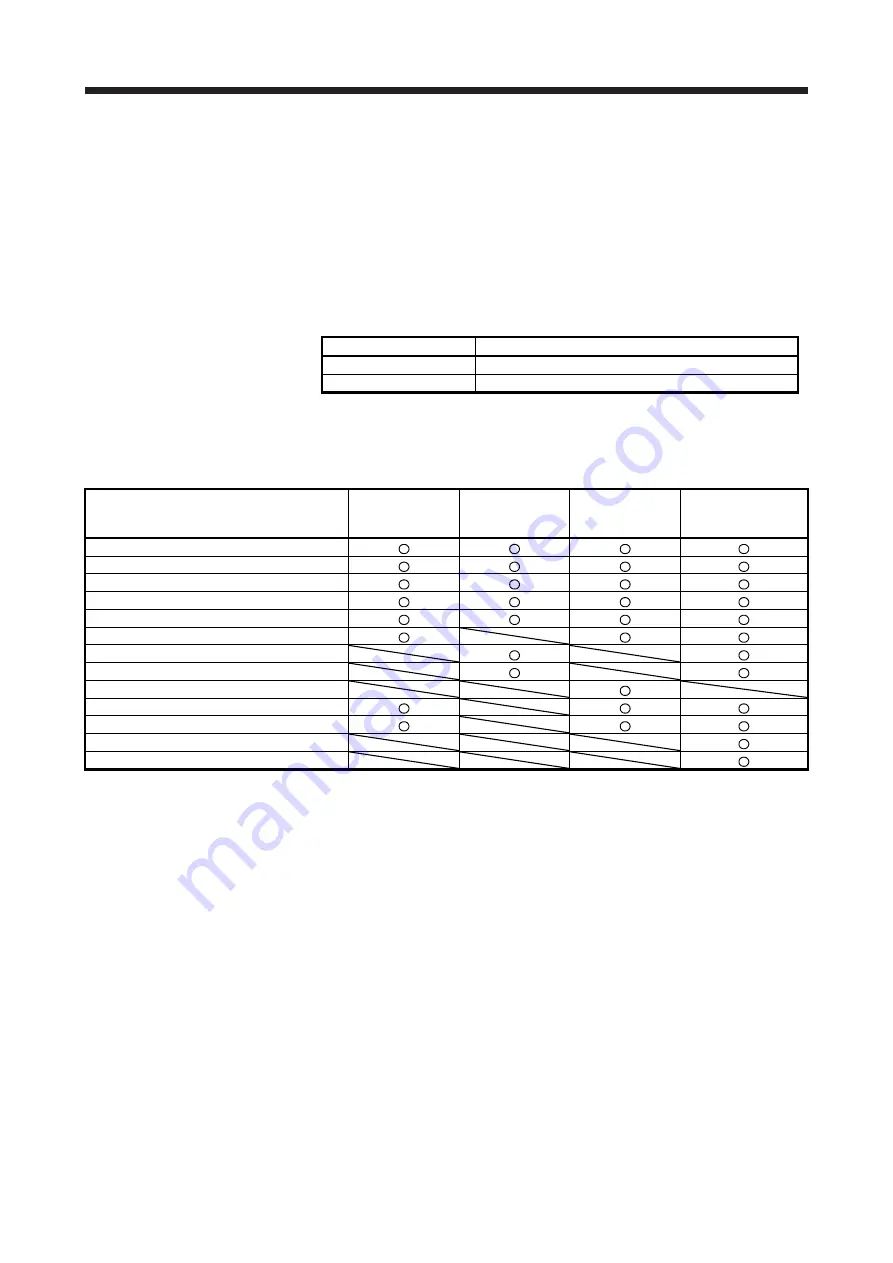
(b) Alarms
The following alarms and warning do not occur. However, the other alarms and warnings occur as
when the servo motor is connected.
Alarm and warning
Rotary servo
motor
Linear servo motor Direct drive motor
(Note) Rotary servo
motor in fully closed
loop system
[AL.16 Encoder initial communication error 1]
[AL.1E Encoder initial communication error 2]
[AL.1F Encoder initial communication error 3]
[AL. 20 Encoder normal communication error 1]
[AL. 21 Encoder normal communication error 2]
[AL. 25 Absolute position erased]
[AL. 28 Linear encoder error 2]
[AL. 2A Linear encoder error 1]
[AL. 2B Encoder counter error]
[AL. 92 Battery cable disconnection warning]
[AL. 9F Battery warning]
[AL. 70 Load-side encoder error 1]
[AL. 71 Load-side encoder error 2]
Note. The fully closed loop system is available for the MR-J4W2-_B servo amplifiers of which software version is A3 or above. Check
the software version using MR Configurator2.
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































