





























6. NORMAL GAIN ADJUSTMENT
6 - 16
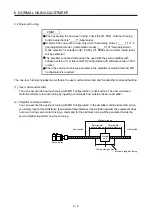
(e) If an error occurs
If a tuning error occurs during tuning, one-touch tuning will be stopped. With that, the following error
code will be displayed in status. Check the cause of tuning error. When executing one-touch tuning
again, stop the servo motor once. In addition, after returning the moving part to the tuning start
position, execute it.
Display
Name
Error detail
Corrective action example
C000
Tuning canceled
The stop button was clicked during one-touch
tuning.
C001
Overshoot exceeded
Overshoot amount is a value larger than the
one set in [Pr. PA10 In-position range] and
[Pr. PA25 One-touch tuning - Overshoot
permissible level].
Increase the in-position range or overshoot
permissible level.
C002
Servo-off during tuning
The one-touch tuning was attempted in the
user command method during servo-off.
The servo amplifier will be servo-off status
during one-touch tuning.
When executing one-touch tuning in the user
command method, turn to servo-on, and then
execute it.
Prevent the servo amplifier from being the
servo-off status during one-touch tuning.
C003
Control mode error
1. The one-touch tuning was attempted while
the torque control mode was selected in
the control modes.
Select the position control mode or speed
control mode for the control mode, and then
execute one-touch tuning. Do not change the
control mode during the one-touch tuning.
2. During one-touch tuning, the control mode
was attempted to change from the position
control mode to the speed control mode.
C004 Time-out
1.
One
cycle
time during the operation has
been over 30 s.
Set one cycle time during the operation (time
from the command start to the next command
start) to 30 s or less.
2. The command speed is slow.
Set the servo motor speed to 100 r/min or
higher. Error is less likely to occur as the
setting speed is higher.
When one-touch tuning by the amplifier
command is used, set a permissible travel
distance so that the servo motor speed is 100
r/min or higher. Set a permissible travel
distance to two or more revolutions as a guide
value to set the servo motor speed to 100
r/min.
3. The operation interval of the continuous
operation is short.
Set the stop interval during operation to 200
ms or more. Error is less likely to occur as the
setting time is longer.
C005
Load to motor inertia
ratio misestimated
1. The estimation of the load to motor inertia
ratio at one-touch tuning was a failure.
Drive the motor with meeting conditions as
follows.
The acceleration time constant/deceleration
time constant to reach 2000 r/min is 5 s or
less.
Speed is 150 r/min or higher.
The load to motor inertia ratio is 100 times
or less.
The acceleration/deceleration torque is
10% or more of the rated torque.
2. The load to motor inertia ratio was not
estimated due to an oscillation or other
influences.
Set to the auto tuning mode that does not
estimate the load to motor inertia ratio as
follows, and then execute the one-touch
tuning.
Select "Auto tuning mode 2 (_ _ _ 2)",
"Manual mode (_ _ _ 3)", or "2 gain
adjustment mode 2 (_ _ _ 4)" of "Gain
adjustment mode selection" in [Pr. PA08].
Manually set [Pr. PB06 Load to motor
inertia ratio] properly.
Summary of Contents for MR-JE-_A
Page 9: ...A 8 MEMO ...
Page 15: ...6 MEMO ...
Page 29: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 139: ...4 STARTUP 4 38 MEMO ...
Page 187: ...5 PARAMETERS 5 48 MEMO ...
Page 221: ...6 NORMAL GAIN ADJUSTMENT 6 34 MEMO ...
Page 259: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 265: ...9 DIMENSIONS 9 6 MEMO ...
Page 273: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 339: ...12 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 12 34 MEMO ...







































































