





























3. SIGNALS AND WIRING
3 - 43
(3) Speed setting in speed control mode
(a) Speed command and speed
The servo motor is run at the speeds set in the parameters or at the speed set in the applied voltage
of VC (Analog speed command). The relation between an applied voltage of VC (Analog speed
command) and servo motor speed, and the rotation direction with turning on ST1/ST2 are the same
as section 3.6.2 (1) (a).
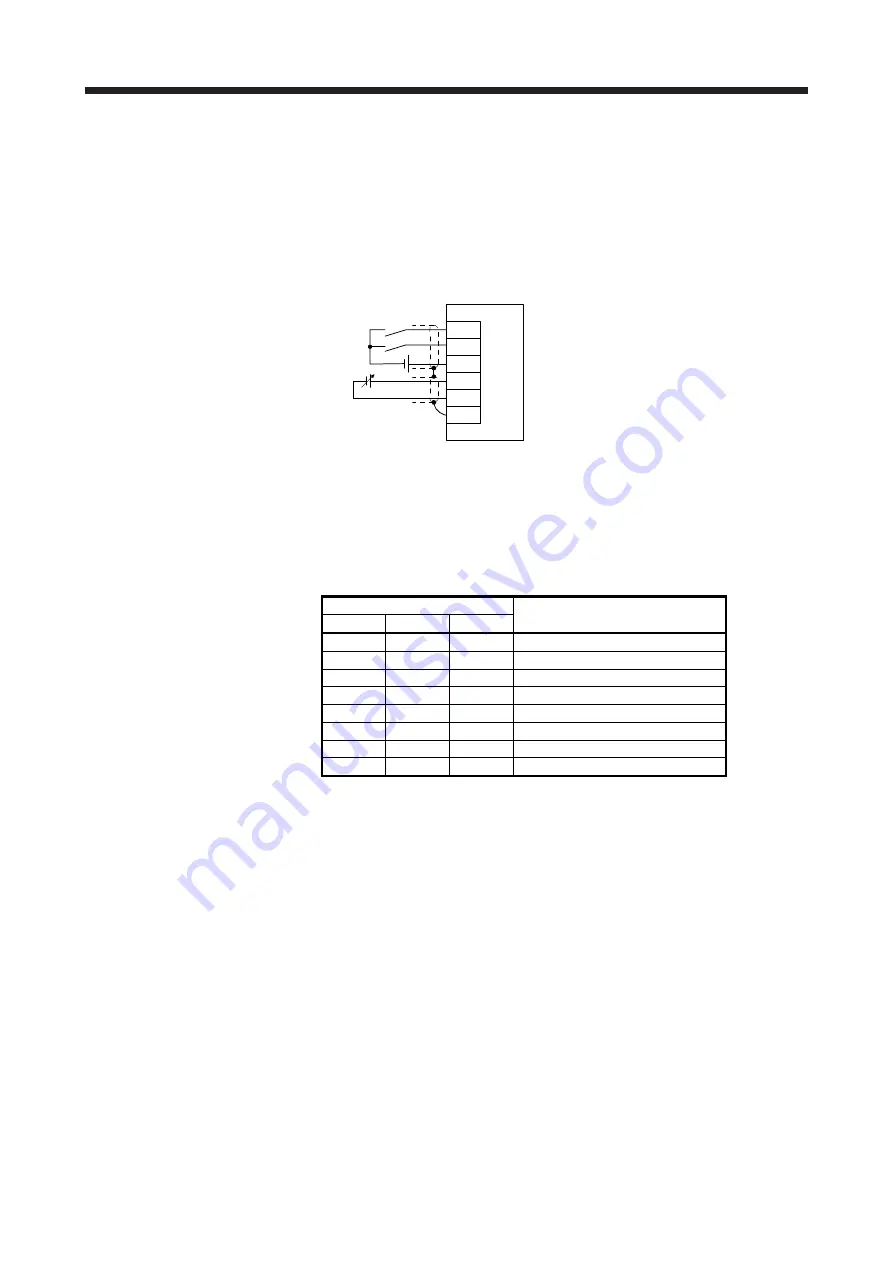
Normally, connect as follows.
(Note)
ST1
ST2
DICOM
VC
LG
SD
Servo amplifier
24 V DC
-10 V to +10 V
Note. This diagram shows sink I/O interface. For source I/O interface, refer to section 3.9.3.
(b) Speed command value selection
To select VC (Analog speed command) and a speed command value of internal speed commands 1
to 7, enable SP1 (Speed selection 1), SP2 (Speed selection 2), and SP3 (Speed selection 3) with
[Pr. PD03] to [Pr. PD20].
(Note) Input device
Speed command value
SP3 SP2 SP1
0
0
0
VC (Analog speed command)
0
0
1
Pr. PC05 Internal speed command 1
0
1
0
Pr. PC06 Internal speed command 2
0
1
1
Pr. PC07 Internal speed command 3
1
0
0
Pr. PC08 Internal speed command 4
1
0
1
Pr. PC09 Internal speed command 5
1
1
0
Pr. PC10 Internal speed command 6
1
1
1
Pr. PC11 Internal speed command 7
Note. 0: Off
1: On
You can change the speed during rotation. Acceleration/deceleration is performed with the setting
values of [Pr. PC01] and [Pr. PC02].
When the internal speed commands 1 to 7 are used to command a speed, the speed does not vary
with the ambient temperature.
(c) SA (Speed reached)
As in section 3.6.2 (2)
Summary of Contents for MR-JE-_A
Page 9: ...A 8 MEMO ...
Page 15: ...6 MEMO ...
Page 29: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 139: ...4 STARTUP 4 38 MEMO ...
Page 187: ...5 PARAMETERS 5 48 MEMO ...
Page 221: ...6 NORMAL GAIN ADJUSTMENT 6 34 MEMO ...
Page 259: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 265: ...9 DIMENSIONS 9 6 MEMO ...
Page 273: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 339: ...12 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 12 34 MEMO ...







































































