



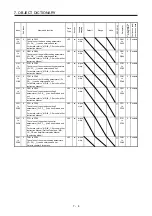


























7. OBJECT DICTIONARY
7 - 14
Index
Sub Index
Name and function
Data
Type
Access
Variable mapping
Default
Range
Units
EEP-ROM
Parameter
No. of points/No.
of Registers
Continuous read/ continuous write
2D51
0 One-touch tuning status
The one-touch tuning progress is returned.
I8
ro Impos-
sible
0
0 to 100
%
1 Impos-
sible
2D52
0 One-touch tuning Stop
Writing "1EA5h" can stop one-touch tuning. Any
value other than "1EA5h" is invalid.
I16
wo Impos-
sible
0000h to
1EA5h
1 Impos-
sible
2D53
0 One-touch tuning Clear
The parameter changed in one-touch tuning
can be returned to the value before the change.
The description of the setting values is as
follows.
0000: Restore the default value
0001: Return the value to before one-touch
tuning.
I16
wo Impos-
sible
0000h to
0001h
1 Impos-
sible
2D54
0 One-touch tuning Error Code
An error code of the one-touch tuning is
returned. The description of the error codes is
as follows.
0000: Normal completion
C000: Tuning canceled
C001: Overshoot exceeded
C002: Servo-off during tuning
C003: Control mode error
C004: Time-out
C005: Load to motor inertia ratio misestimated
C00F: One-touch tuning disabled
I16
ro Impos-
sible
0000h
0000h to
C00Fh
1 Impos-
sible
2D60
(Note
2)
0 Target point table
[Point table mode (pt) case]
Specify a point table No.
0: Not in operation
1 to 255: Specified point table execution
-1: High-speed home position return
[Indexer mode (idx) case]
Specify the next station No.
0 to 254 Positioning operation to specified
station
I16
rw Possible
-1 to 255
1 Impos-
sible
2D68
(Note
2)
0 Point demand value
Current specified point table number or the next
station position number is returned. While the
servo motor is stopped, the value of Target
point table (2D60h) is returned.
I16
ro Possible
0 to 255
1 Possible
2D69
(Note
2)
0 Point actual value
[Point table mode (pt) case]
The completed point table is returned. After
homing completed, "0" is set.
[Indexer mode (idx) case]
The completed station No. is returned. The
previous value is held until completion.
I16
ro Possible
0 to 255
1 Possible
2D6A
(Note
2)
0 M code actual value
The completed M code of the point table is
returned.
In the indexer method, "00h" is returned.
U8
ro Possible
00h to 63h
1 Possible
2D6B
(Note
2)
0 Torque limit value 2
When the servo motor is stopping, set the
torque limit value in indexer mode (idx).
U16
rw Possible
10000
0 to 10000
0.1%
PC35
1 Possible
2D98
(Note
2)
0 Select behavior of broadcast message
The setting of the broadcast communication of
the Modbus RTU communication can be read
and write.
0: Broadcast instruction enabled
1: Broadcast instruction disabled
U8
rw Impos-
sible
0
0 to 1
1 Impos-
sible
Summary of Contents for MR-JE-C Series
Page 9: ...A 8 MEMO ...
Page 13: ...4 MEMO ...
Page 33: ...2 CC Link IE Field Network Basic SLMP 2 16 MEMO ...
Page 73: ...5 PARAMETERS 5 14 MEMO ...
Page 79: ...6 MANUFACTURER FUNCTIONS 6 6 MEMO ...
Page 143: ...MEMO ...







































































