





























5Maintenance and Inspection
Maintenance and inspection procedures 4-100
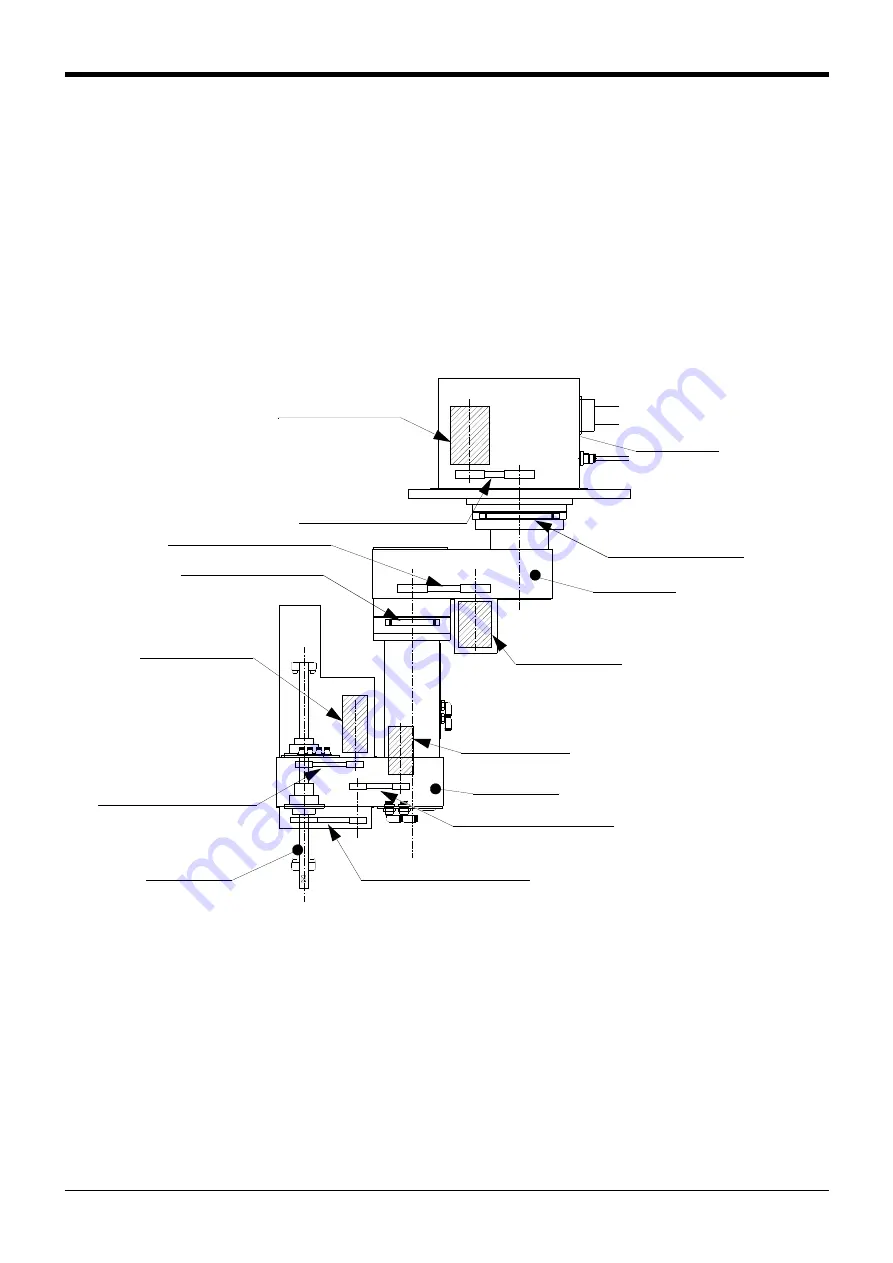
(3) RH-3FRHR series
1) The rotation of the J1 axis motor <1> arranged in the base is conveyed to the reduction gears <3> via the
timing belt <2> to rotate the J1 axis.
Brakes are not mounted in the J1 axis motor.
2) The rotation of the J2 axis motor <4> arranged in the No.1 arm is conveyed to the reduction gears <6> via
the timing belt <5> to rotate the J2 axis.
Brakes are not mounted in the J2 axis motor.
3) The rotation of the J3 axis motor <7> arranged in the No.2 arm is conveyed to the shaft via the timing belt
<8> to move the J3 axis as up and down.
Non-excitation magnetic brakes are mounted in the J3 axis motor.
4) The rotation of the J4 axis motor <9> arranged in the No.2 arm is conveyed to the shaft via the timing belt
(motor side) <10> and the timing belt (shaft side) <11> to rotate the J4 axis.
Brakes are not mounted in the J4 axis motor.
Fig.5-3 : Outline structure drawing of robot arm (RH-3FRHR series)
Base
<1> J1 axis motor
<2> Timing belt
<5> Timing belt
<6> Reduction gears
<7> J3 axis motor
<8> Timing belt
Shaft
<11> Timing belt
(Shaft side)
<10> Timing belt
(Motor side)
No.2 arm
<9> J4 axis motor
<4> J2 axis motor
No.1 arm
<3> Reduction gears







































































