





























2-9
Installation
2Unpacking to Installation
2.2.2 Transportation procedures
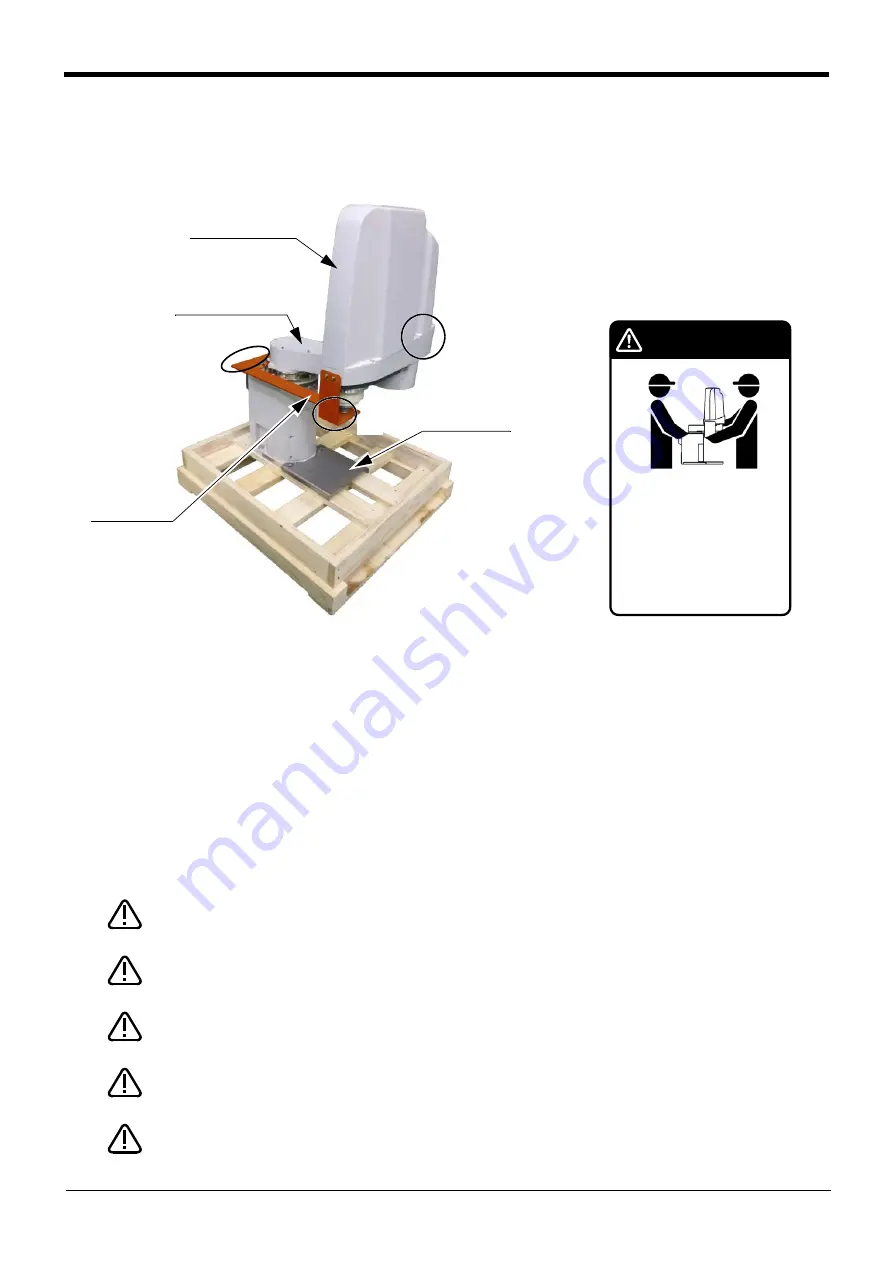
(1) RH-3FRH/6FRH series
Fig.2-3 : Transportation of robot arm (RH-3FRH/6FRH series)
1) The robot must be transported by two workers with putting the fixing plate A and B. Place the robot on a
cart, etc., and move it to near the installation place. Transporting the robot with the following should be lim
-
ited to placing the robot on the frame or cart, and to positioning.
2) When transporting the robot arm, one person should hold the fixing plate A of No.2 arm <1> and No.2 arm
<2> and another person should hold the fixing plate A of base <3>. When transporting the robot, do not apply
force to the cover, or apply a strong shock on the robot.
3) Remove the fixtures after installing the robot.
4) Always attach the fixing plate, and follow the above procedures and methods to transport the robot for
secondary transportation, such as when changing the installation position.
If the arm is directly holded without using the specified fixing plate, or if it is holded in the work posture, the
configuration devices could be damaged, and the transportation workers will be subject to risk due to an
inadequate center of gravity position.
To prevent accidents, do not hold the robot from the left/right sides, or hold covers that
have no grips.
Be careful not to apply force to the shaft section (J3 axis). The shaft may be damaged
and the overload error may occur at the time of movement.
When installing the fixing tool again, place the robot in the posture where each axis
shows the values listed in
.
The robot should keep vertical. (not be horizontal)
It becomes the cause of the grease leakage or the trouble.
The ventilation duct is attached to the clean specification robot’s base section rear.
Please handle with care when transporting or installing the robot arm.
注意 CAUTION
VORSICHT
ロ ボ ッ ト の 運 搬 は 、 図 の 姿 勢 の よ う に
2 人 で お こ な っ て く だ さ い 。
T h e r o b o t m u s t a l w a y s b e
t r a n s p o r t e d b y t w o w o r k e r s .
B e i e i n e m T r a n s p o r t s o l l t e
d e r R o b o t e r v o n 2
P e r s o n e n a n d e n i n d e r
A b b i l d u n g g e z e i g t e n S t e l l e n
a n g e h o b e n w e r d e n .
Fixing plate B
No.1 arm
No.2 arm
<1>
<3>
Mass
RH-3FRH35** series: Approx. 31kg
RH-3FRH45** series: Approx. 32kg
RH-3FRH55** series: Approx. 33kg
RH-6FRH35** series: Approx. 39kg
RH-6FRH45** series: Approx. 40kg
RH-6FRH55** series: Approx. 41kg
Fixing plate A
<2>
*The grease for preventing rust is applied
at the tip of the shaft (J3 axis) in gen
-
eral-purpose environment robot.
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION







































































