





























5Maintenance and Inspection
Maintenance and inspection procedures 4-98
5.3 Maintenance and inspection procedures
The procedures for carrying out the periodic maintenance and inspection are described in this section. Thoroughly
read the contents, and follow the instructions. This work can be commissioned to the Mitsubishi Service Depart
-
ment for a fee. (Never disassemble, etc., the parts not described in this manual.)
The maintenance parts, etc., required for the customer to carry out maintenance and inspection are described in
Page 140, "5.5 Maintenance parts"
of this manual. Always contact your dealer when parts are needed.
The origin of the machine system could deviate when this work is carried out.
"Review of the position data" and "re-teaching" will be required.
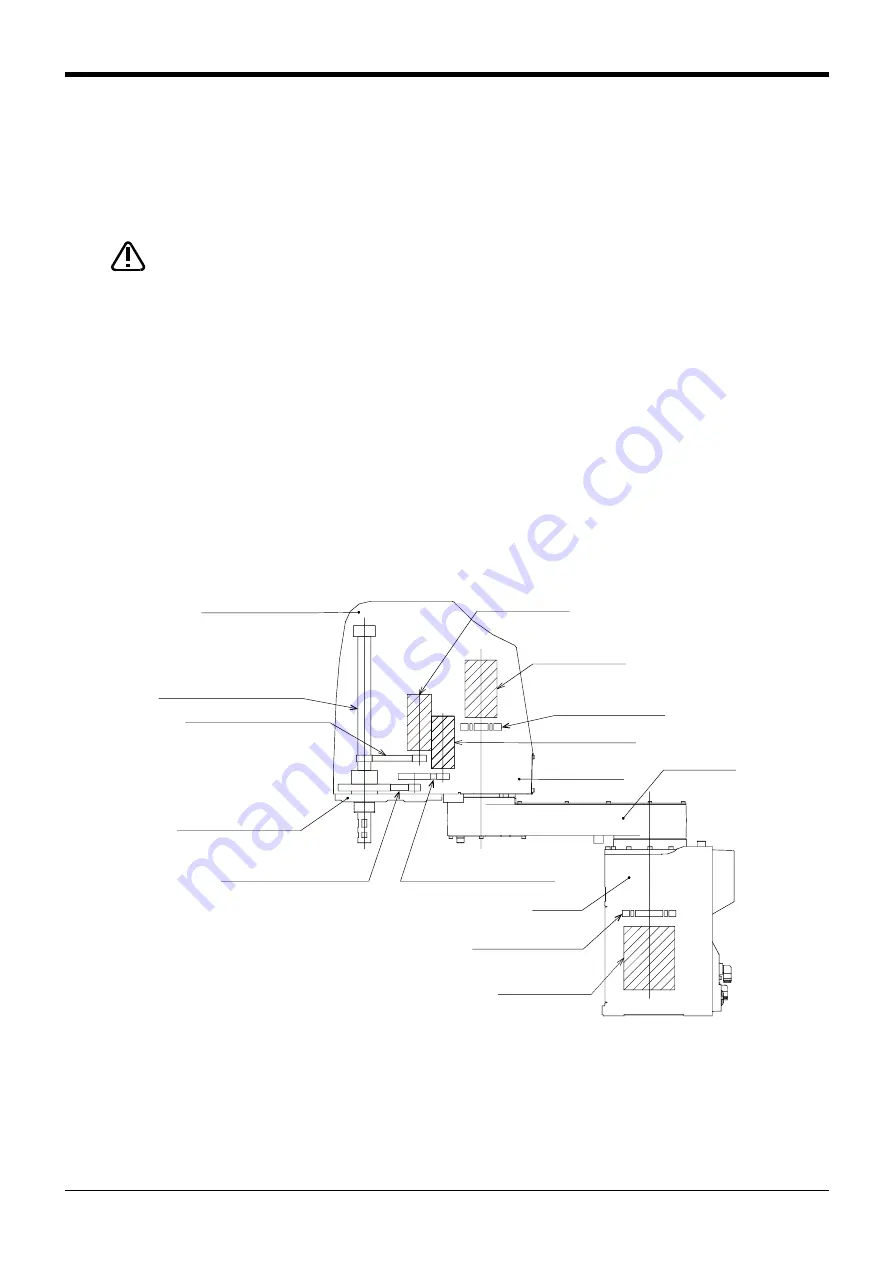
5.3.1 Robot arm structure
An outline structure drawing is shown below.
(1) RH-3FRH series
1) The J1 axis is rotated by the J1 axis motor <1> and the reduction gears <2> in the base. Brakes are not
mounted in the J1 axis motor <1>.
2) The J2 axis is rotated by the J2 axis motor <3> and the reduction gears <4> in the No. 2 arm. Brakes are
not mounted in the J2 axis motor <3>.
3) The rotation of the J3 axis motor <8> arranged in the No.2 arm is conveyed to the ball screw spline via the
timing belt <9> to move the J3 axis as up and down. Non-excitation magnetic brakes are mounted in the J3
axis motor <8>.
4) The rotation of the J4 axis motor <5> arranged in the No.2 arm is conveyed to the ball screw spline via the
timing belt 1 <6> and the timing belt 2 <7> to rotate the J4 axis. Brakes are not mounted in the J4 axis
motor.
Fig.5-1 : Outline structure drawing of robot arm (RH-3FRH)
CAUTION
㻺㼛㻚㻞㻌㼍㼞㼙㻌㼏㼛㼢㼑㼞㻌㼁
㻨㻝㻝㻪㻌㻮㼍㼘㼘㻌㼟㼏㼞㼑㼣㻌㼟㼜㼘㼕㼚㼑
㻨㻥㻪㻌㻶㻟㻌㼍㼤㼕㼟㻌㼠㼕㼙㼕㼚㼓㻌㼎㼑㼘㼠
㻨㻣㻪㻌㻶㻠㻌㼍㼤㼕㼟㻌㼠㼕㼙㼕㼚㼓㻌㼎㼑㼘㼠㻌㻞
㻨㻢㻪㻌㻶㻠㻌㼍㼤㼕㼟㻌㼠㼕㼙㼕㼚㼓㻌㼎㼑㼘㼠㻌㻝
㻨㻞㻪㻌㻾㼑㼐㼡㼏㼠㼕㼛㼚㻌㼓㼑㼍㼞㼟
㻨㻝㻪㻌㻶㻝㻌㼍㼤㼕㼟㻌㼙㼛㼠㼛㼞
㻮㼍㼟㼑
㻺㼛㻚㻝㻌㼍㼞㼙
㻺㼛㻚㻞㻌㼍㼞㼙
㻨㻡㻪㻌㻶㻠㻌㼍㼤㼕㼟㻌㼙㼛㼠㼛㼞
㻨㻠㻪㻌㻾㼑㼐㼡㼏㼠㼕㼛㼚㻌㼓㼑㼍㼞㼟
㻨㻟㻪㻌㻶㻞㻌㼍㼤㼕㼟㻌㼙㼛㼠㼛㼞
㻨㻤㻪㻌㻶㻟㻌㼍㼤㼕㼟㻌㼙㼛㼠㼛㼞
㻺㼛㻚㻞㻌㼍㼞㼙㻌㼏㼛㼢㼑㼞㻌㻰







































































